



Welcome
I am a Professor at School of Artificial Intelligence and Robotics and National Engineering Research Center of Robot Visual Perception and Control Technology, Hunan University (HNU). I was a PostDoctoral Researcher at Computer Vision for Human-Computer Interaction (CV:HCI) Lab, Karlsruhe Institute of Technology (KIT), where I worked with Prof. Rainer Stiefelhagen. I obtained my PhD degree in Information Sensing and Instrumentation from Zhejiang University (ZJU). My PhD research was jointly advised by Prof. Kaiwei Wang and Prof. Jian Bai at State Key Laboratory of Modern Optical Instrumentation, ZJU, as well as Prof. Luis Miguel Bergasa at Robotics and eSafety (RobeSafe) Research Group, University of Alcalá (UAH). Before my PhD, I obtained my dual B.S. degrees in Measurement Technology and Instrumentation from Beijing Institute of Technology (BIT) and Economics from Peking University (PKU).
At Computer Vision for Panoramic Understanding Lab (CV:PU), we research computer vision and computational imaging methods for panoramic and holistic perception to enable omnidirectional, multi-dimensional, omni-modal, and cross-embodiment scene understanding in order to support open- and real-world applications spanning across autonomous driving, assistive navigation, and quadruped robot systems. If you have an interest in {Computer Vision, Scene Understanding, Embodied AI, Autonomous Driving}, please send an e-mail to kailun.yang@hnu.edu.cn.
Publications
2026 折叠
2025 折叠
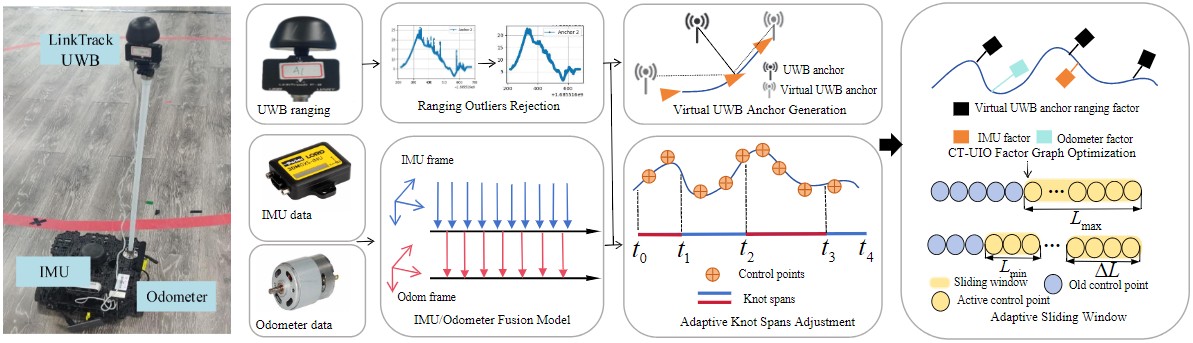
J. Sun, W. Sun, G. Zhang, K. Yang, S. Li, X. Meng, N. Deng, C. Tan.
CT-UIO: Continuous-Time UWB-Inertial-Odometer Localization Using Non-Uniform B-spline with Fewer Anchors.
IEEE Transactions on Mobile Computing, 2025.
[PDF]
[DATA+CODE]
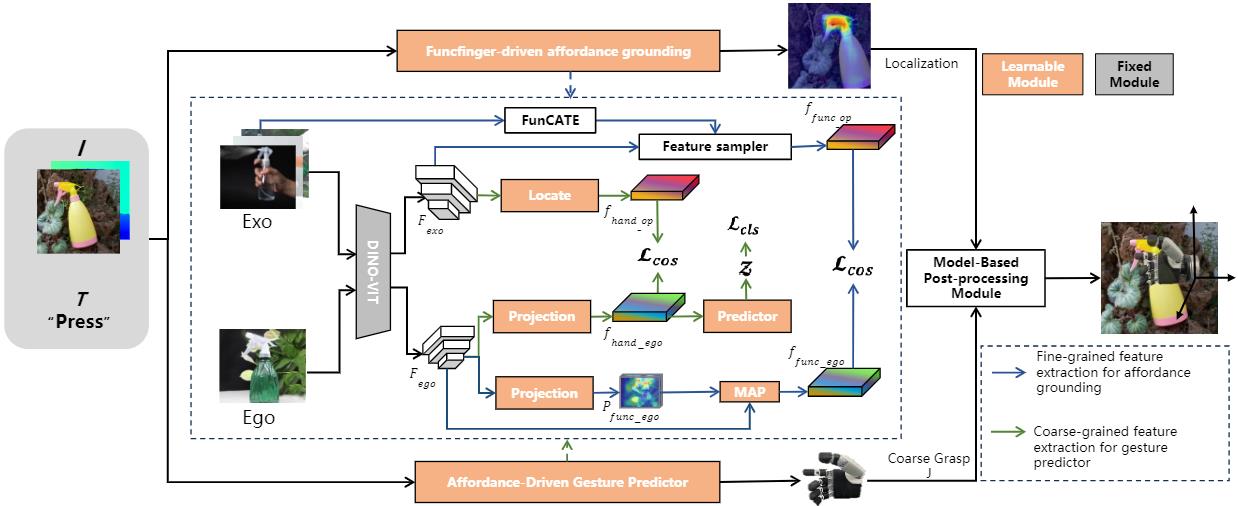
F. Yang, W. Chen, K. Yang, H. Lin, D. Luo, C. Tang, Z. Li, Y. Wang.
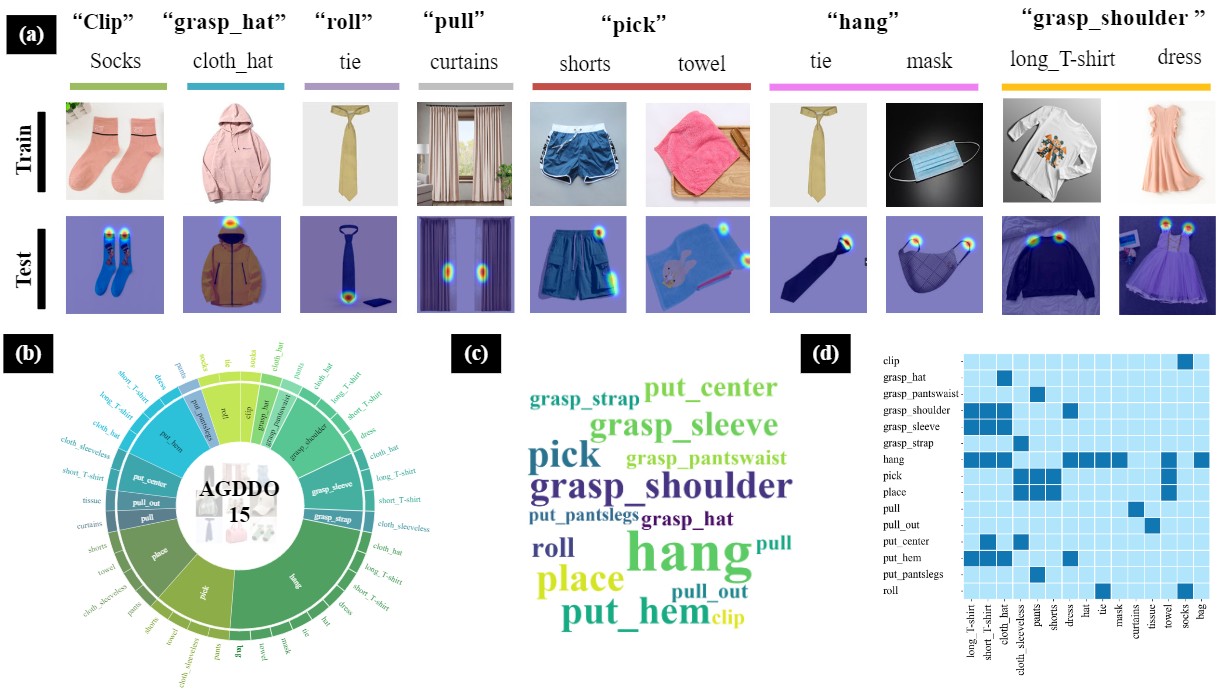
Learning Granularity-Aware Affordances from Human-Object Interaction for Tool-Based Functional Grasping in Dexterous Robotics.
IEEE Transactions on Neural Networks and Learning Systems, 2025.
[PDF]
[DATA+CODE]
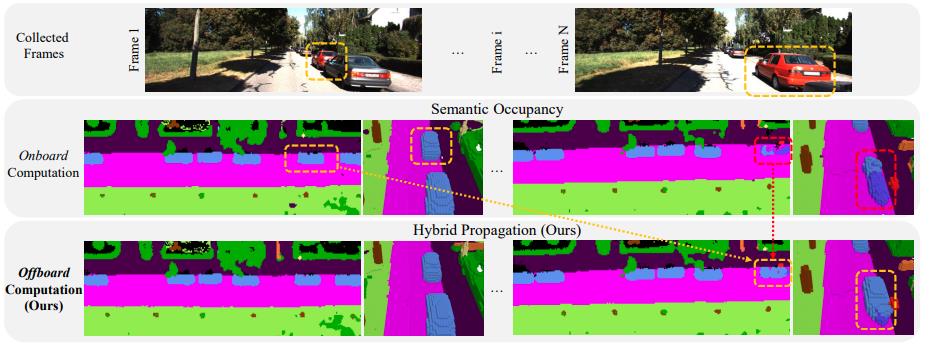
H. Shi, S. Wang, J. Zhang, X. Yin, G. Wang, J. Zhu, K. Yang, K. Wang.
Offboard Occupancy Refinement with Hybrid Propagation for Autonomous Driving.
IEEE Transactions on Intelligent Transportation Systems, 2025.
[PDF]
[CODE]
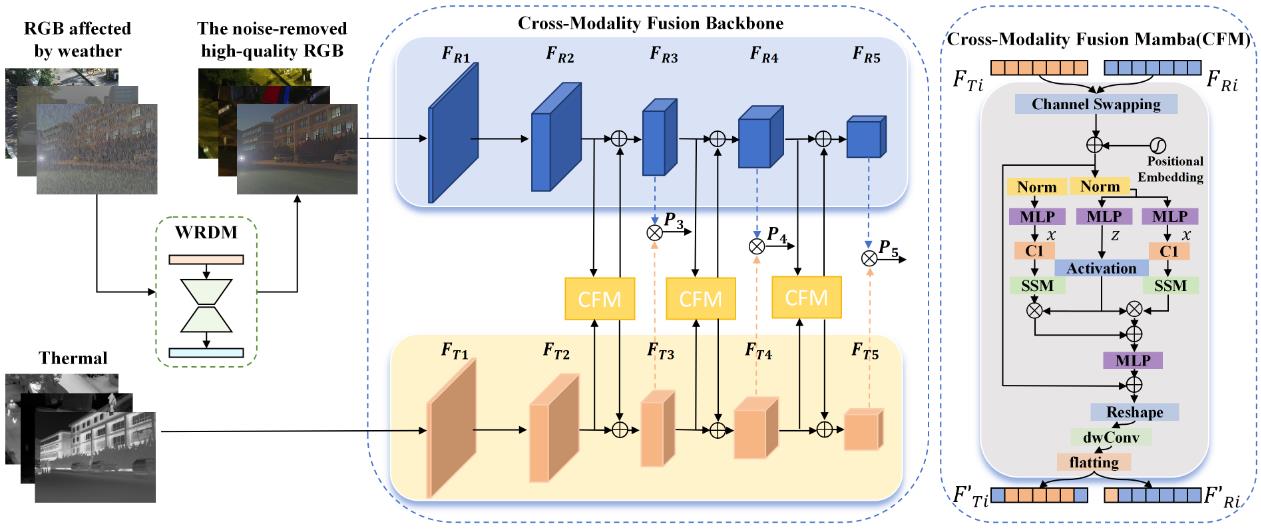
H. Li, Q. Hu, B. Zhou, Y. Yao, J. Lin, K. Yang, P. Chen.
CFMW: Cross-modality Fusion Mamba for Robust Object Detection under Adverse Weather.
IEEE Transactions on Circuits and Systems for Video Technology, 2025.
[PDF]
[DATA+CODE]
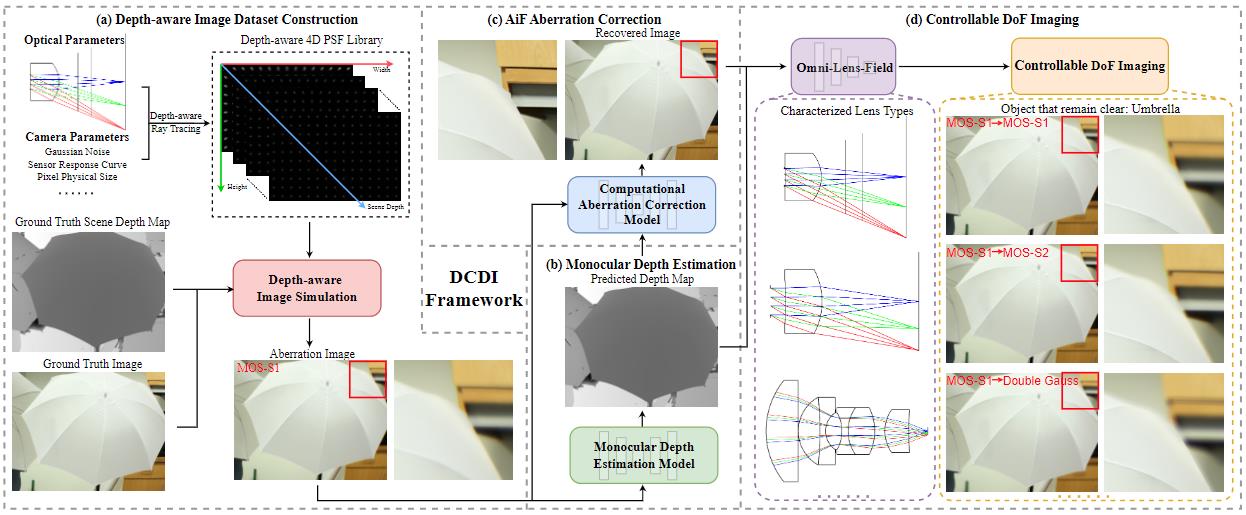
X. Qian, Q. Jiang, Y. Gao, S. Gao, Z. Yi, L. Sun, K. Wei, H. Li, K. Yang, K. Wang, J. Bai.
Towards Single-Lens Controllable Depth-of-Field Imaging via Depth-Aware Point Spread Functions.
IEEE Transactions on Computational Imaging, 2025.
[PDF]
[DATA+CODE]
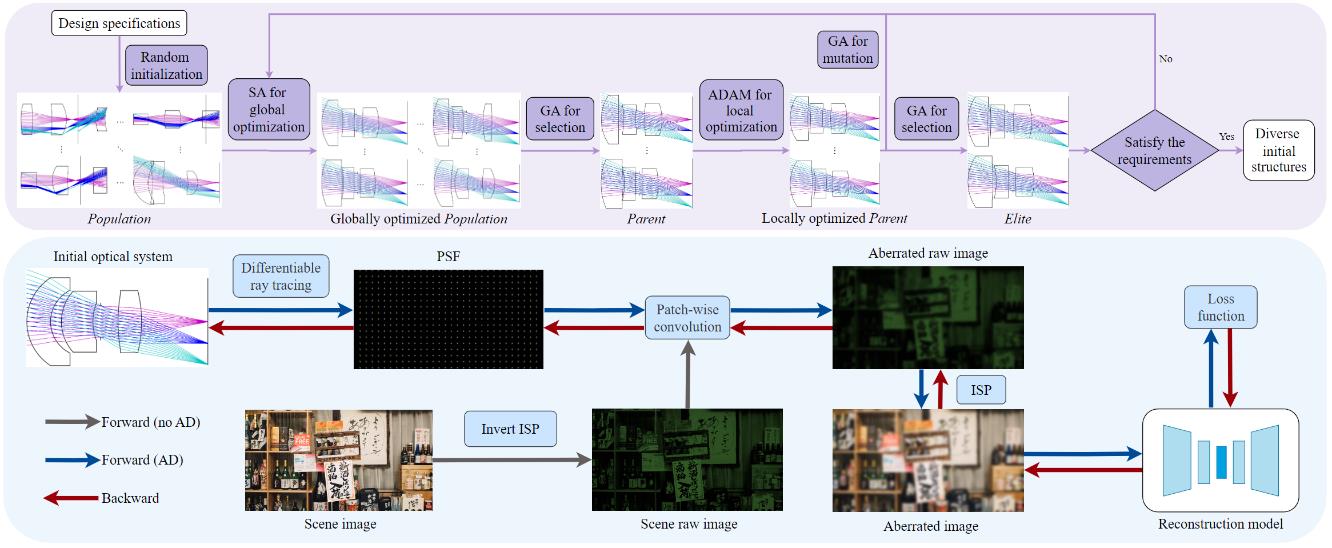
Y. Gao, Q. Jiang, S. Gao, L. Sun, K. Yang, K. Wang.
Exploring Quasi-Global Solutions to Compound Lens Based Computational Imaging Systems.
IEEE Transactions on Computational Imaging, 2025.
[PDF]
[CODE]

H. Lin, W. Chen, X. Chen, F. Yang, Q. Diao, W. Xie, S. Wu, K. Yang, M. Li, Y. Wang.
UniFucGrasp: Human-Hand-Inspired Unified Functional Grasp Annotation Strategy and Dataset for Diverse Dexterous Hands.
IEEE Robotics and Automation Letters, 2025.
[PDF]
[DATA+CODE]
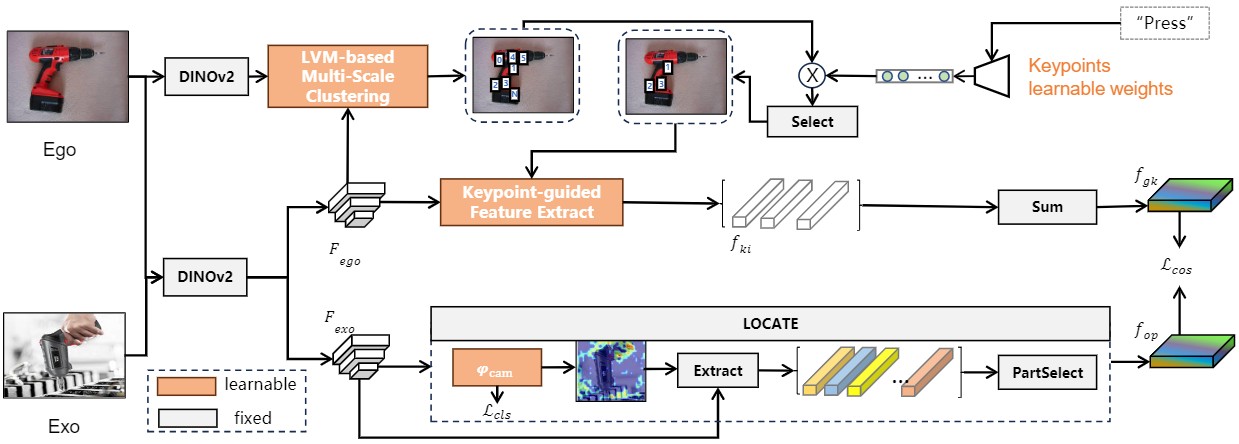
F. Yang, D. Luo, W. Chen, J. Lin, J. Cai, K. Yang, Z. Li, Y. Wang.
Multi-Keypoint Affordance Representation for Functional Dexterous Grasping.
IEEE Robotics and Automation Letters, 2025.
[PDF]
[DATA+CODE]
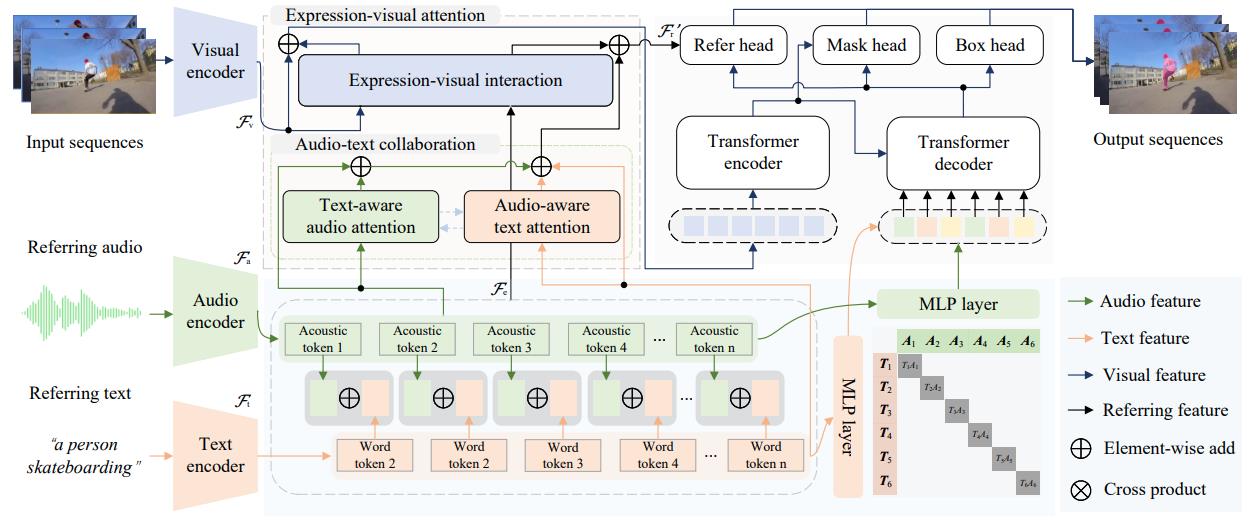
J. Chen, J. Lin, G. Zhong, H. Fu, K. Nai, K. Yang, Z. Li.
Expression Prompt Collaboration Transformer for Universal Referring ideo Object Segmentation.
Knowledge-Based Systems, 2025.
[PDF]
[CODE]
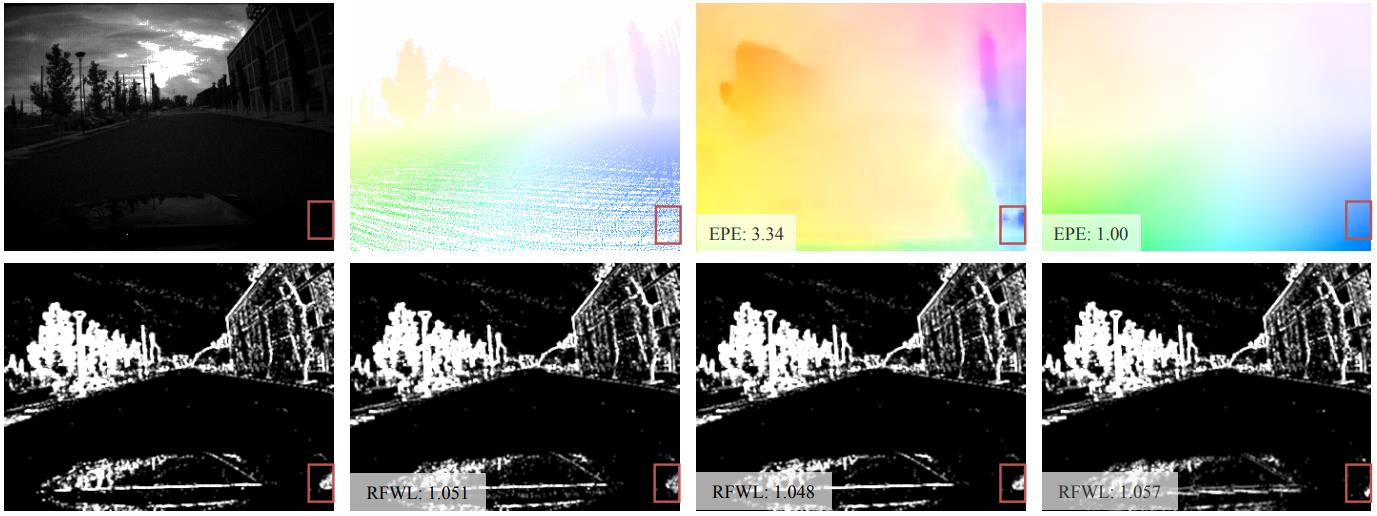
Y. Ye, H. Shi, K. Yang, Z. Wang, X. Yin, L. Sun, Y. Wang, K. Wang.
Towards Anytime Optical Flow Estimation with Event Cameras.
Sensors, 2025.
[PDF]
[CODE]
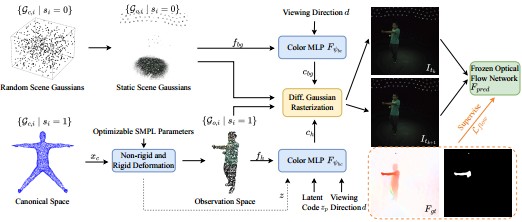
X. Yin, H. Shi, K. Yang, J. Zhai, S. Guo, K. Wang.
E-Sem3DGS: Monocular Human and Scene Reconstruction via Event-Aided Semantic 3DGS.
Sensors, 2025.
[PDF]
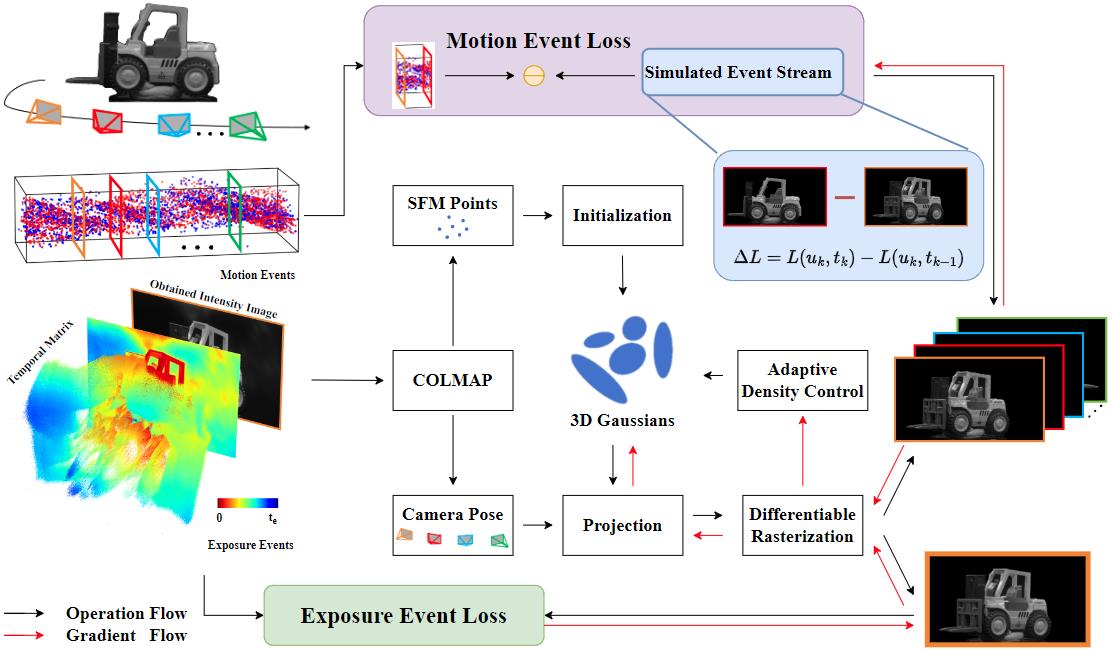
X. Yin, H. Shi, Y. Bao, Z. Bing, Y. Liao, K. Yang, K. Wang.
E-3DGS: Gaussian Splatting with Exposure and Motion Events.
Applied Optics, 2025.
[PDF]
[DATA+CODE]
K. Peng, J. Huang, X. Huang, D. Wen, J. Zheng, Y. Chen, K. Yang, J. Wu, C. Hao, R. Stiefelhagen.
HopaDIFF: Holistic-Partial Aware Fourier Conditioned Diffusion for Referring Human Action Segmentation in Multi-Person Scenarios.
In Conference on Neural Information Processing Systems (NeurIPS), San Diego, CA, United States, December 2024.
[PDF]
[DATA+CODE]
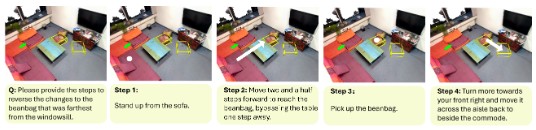
R. Liu, J. Zheng, Y. Chen, Z. Wang, K. Peng, K. Yang, J. Zhang, M. Pollefeys, R. Stiefelhagen.
Situat3DChange: Situated 3D Change Understanding Dataset for Multimodal Large Language Model.
In Conference on Neural Information Processing Systems (NeurIPS), San Diego, CA, United States, December 2024.
[PDF]
[DATA+CODE]
K. Ying, R. Liu, C. Chen, M. Tao, H. Shi, K. Yang, J. Zhang, R. Stiefelhagen.
mmWalk: Towards Multi-modal Multi-view Walking Assistance.
In Conference on Neural Information Processing Systems (NeurIPS), San Diego, CA, United States, December 2024.
[PDF]
[DATA+CODE]
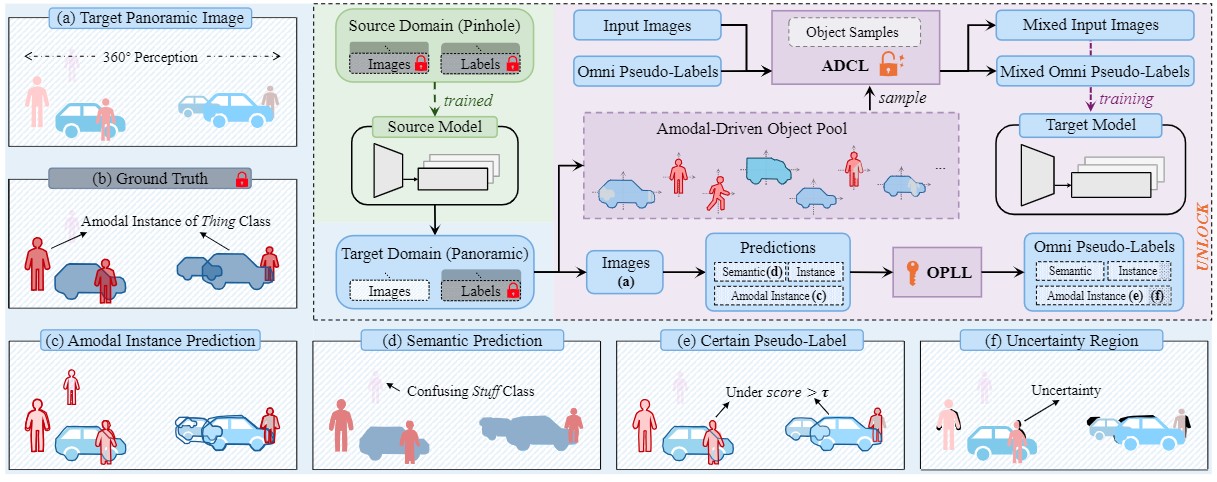
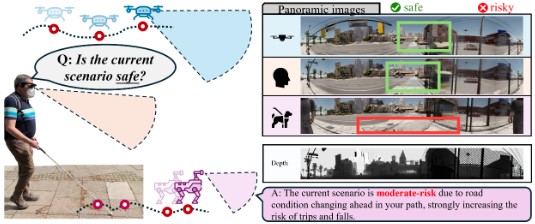
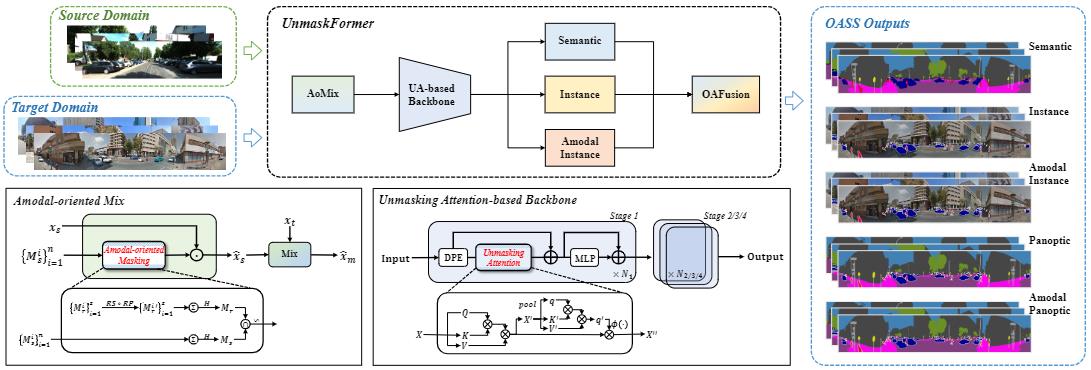
Y. Cao, J. Zhang, X. Zheng, H. Shi, K. Peng, H. Liu, K. Yang, H. Zhang.
Unlocking Constraints: Source-Free Occlusion-Aware Seamless Segmentation.
In IEEE/CVF International Conference on Computer Vision (ICCV), Honolulu, HI, United States, October 2025.
[PDF]
[DATA+CODE]
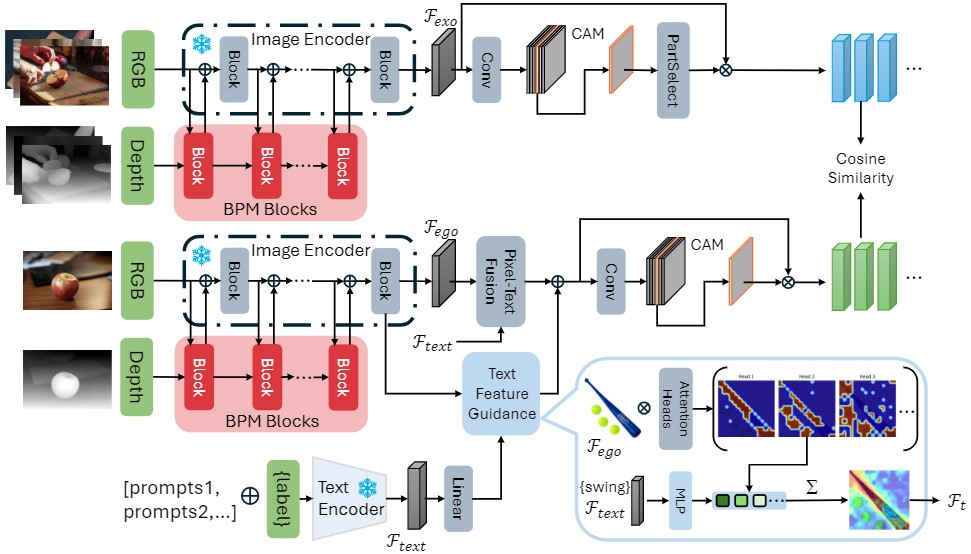
Y. Huang, F. Yang, G. Zhu, G. Li, H. Shi, Y. Zuo, W. Chen, Z. Li, K. Yang.
Resource-Efficient Affordance Grounding with Complementary Depth and Semantic Prompts.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, October 2025.
[PDF]
[CODE]
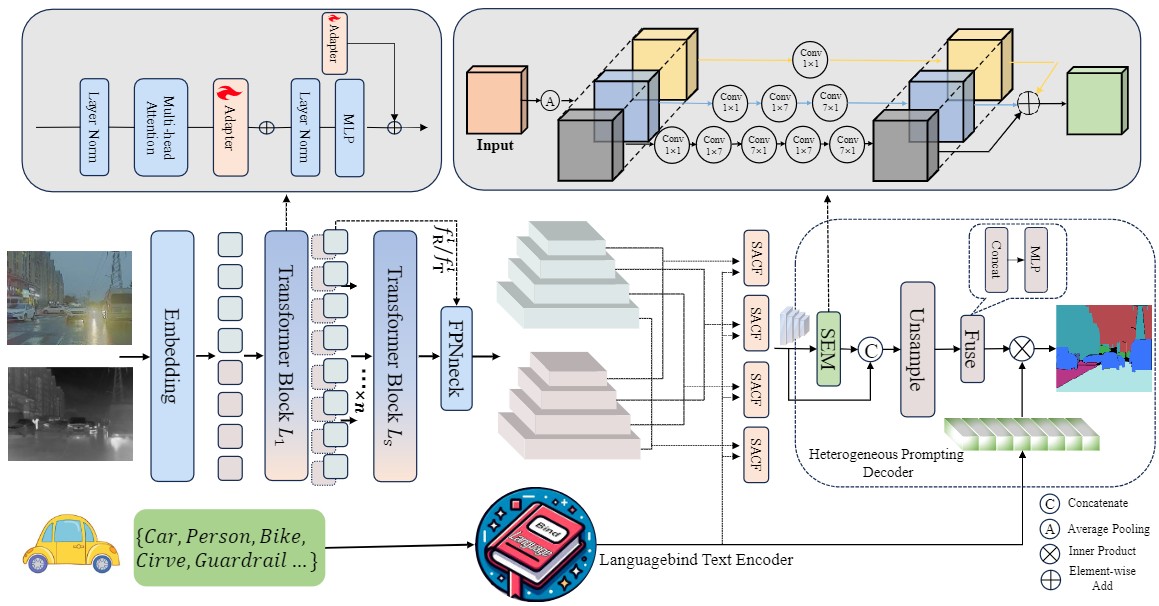
J. Zhao, F. Teng, K. Luo, G. Zhao, Z. Li, X. Zheng, K. Yang.
Unveiling the Potential of Segment Anything Model 2 for RGB-Thermal Semantic Segmentation with Language Guidance.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, October 2025.
[PDF]
[CODE]
W. Jia, F. Yang, M. Duan, X. Chen, Y. Wang, Y. Jiang, W. Chen, K. Yang, Z. Li.
One-Shot Affordance Grounding of Deformable Objects in Egocentric Organizing Scenes.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, October 2025.
[PDF]
[DATA+CODE]
Z. Wang, Y. Li, L. Xu, H. Shi, Z. Ma, Z. Chu, C. Li, F. Gao, K. Yang, K. Wang.
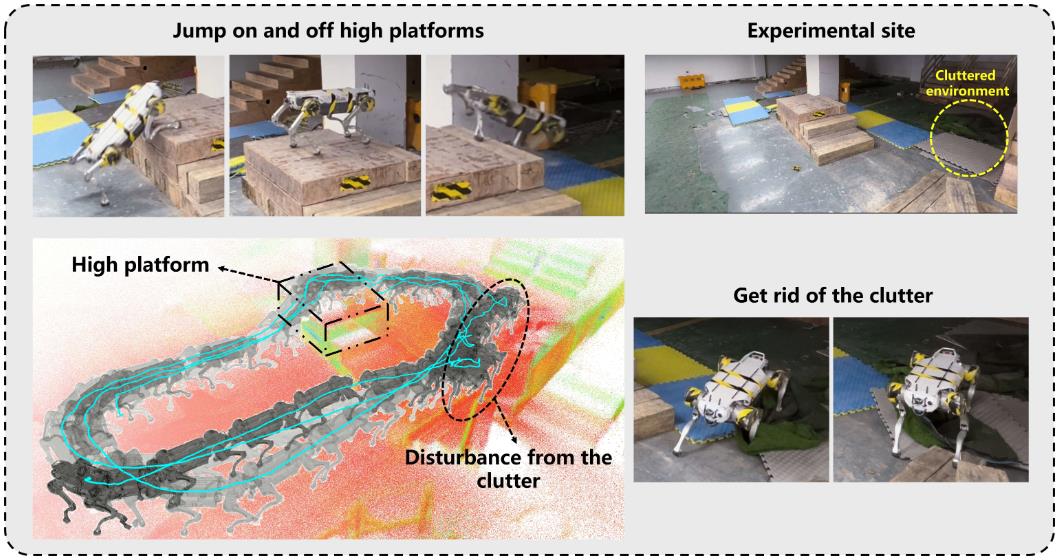
SF-TIM: A Simple Framework for Enhancing Quadrupedal Robot Jumping Agility by Combining Terrain Imagination and Measurement.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, October 2025.
[PDF]
[VIDEO]
L. Wang, H. Shi, X. Yin, K. Yang, K. Wang, J. Bai.
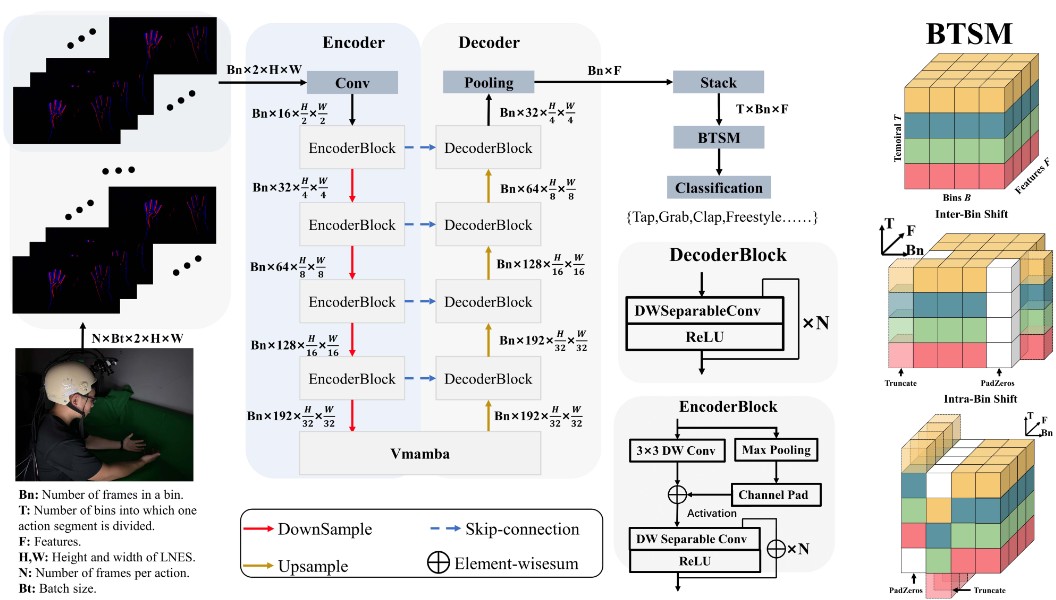
EgoEvGesture: Gesture Recognition Based on Egocentric Event Camera.
In 2025 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Vienna, Austria, October 2025.
[PDF]
[DATA+CODE]

L. Fan, D. Wen, K. Peng, K. Yang, J. Zhang, R. Liu, Y. Chen, J. Zheng, J. Wu, X. Han, R. Stiefelhagen.
Exploring Video-Based Driver Activity Recognition under Noisy Labels.
In 2025 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Vienna, Austria, October 2025.
[PDF]
[CODE]
S. Wu, F. Teng, H. Shi, Q. Jiang, K. Luo, K. Wang, K. Yang.
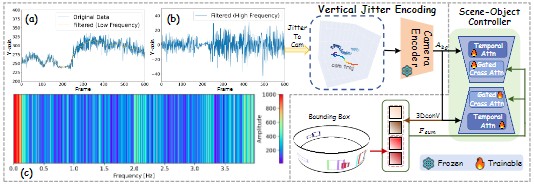
QuaDreamer: Controllable Panoramic Video Generation for Quadruped Robots.
In Conference on Robot Learning (CoRL), Seoul, Korea, September 2025.
[PDF]
[CODE]
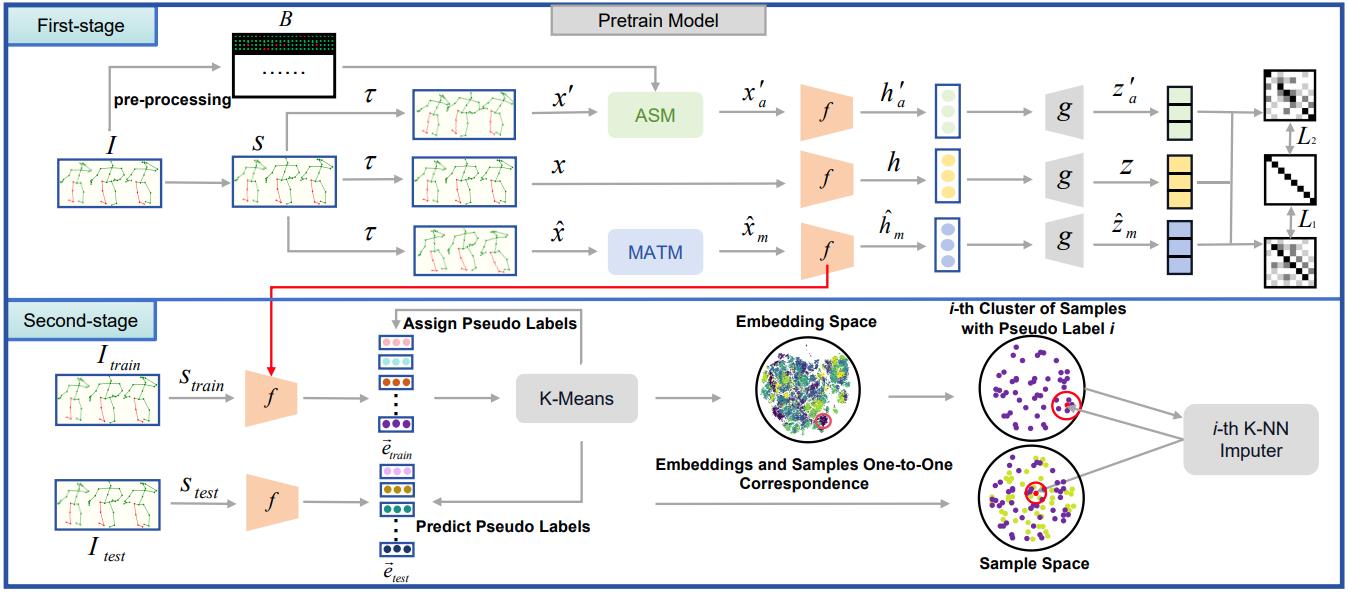
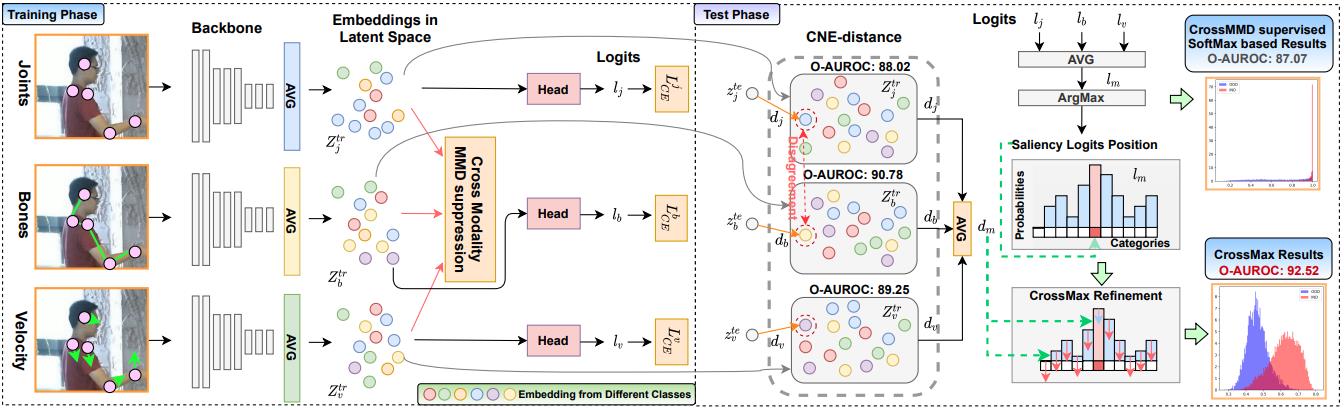
Y. Chen, K. Peng, A. Roitberg, D. Schneider, J. Zhang, J. Zheng, Y. Chen, R. Liu, K. Yang, R. Stiefelhagen.
Exploring Self-supervised Skeleton-based Action Recognition in Occluded Environments.
In International Joint Conference on Neural Networks (IJCNN), Rome, Italy, June 2025.
[PDF]
[CODE]
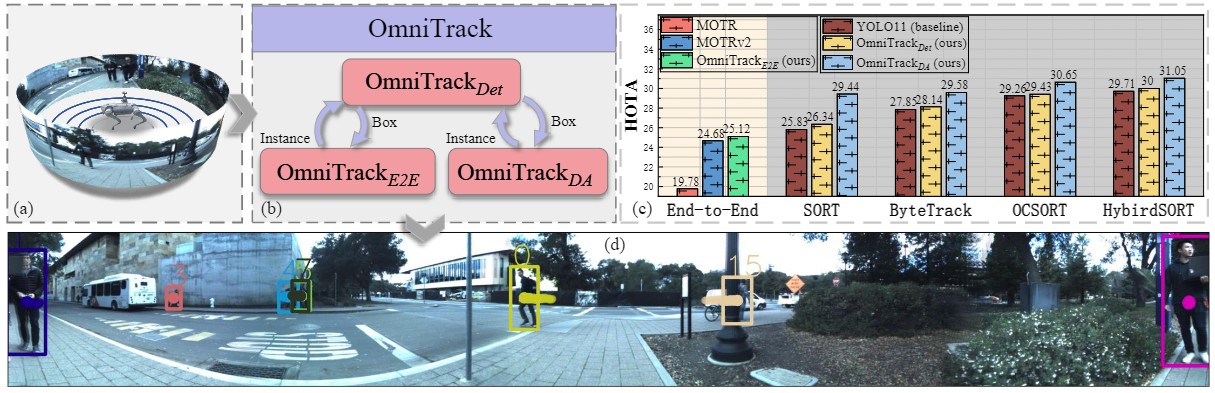
K. Luo, H. Shi, S. Wu, F. Teng, M. Duan, C. Huang, Y. Wang, K. Wang, K. Yang.
Omnidirectional Multi-Object Tracking.
In IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, United States, June 2025.
[PDF]
[DATA+CODE]
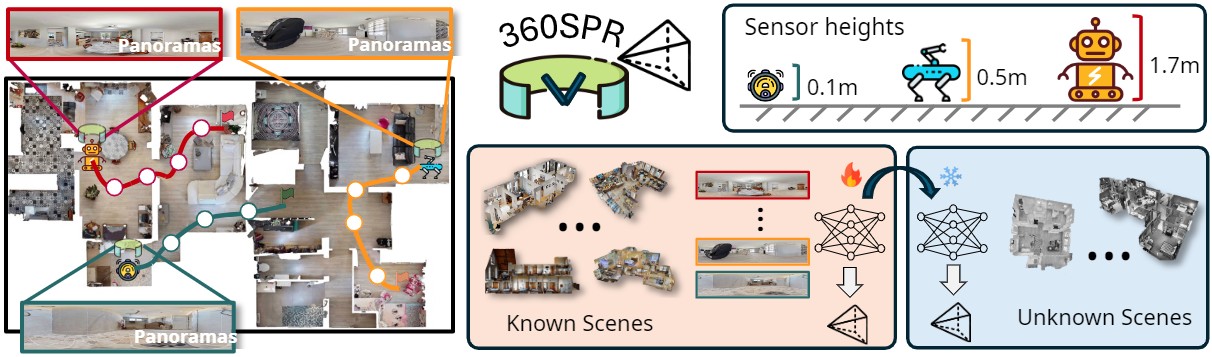
J. Zheng, R. Liu, Y. Chen, Z. Chen, K. Yang, J. Zhang, R. Stiefelhagen.
Scene-agnostic Pose Regression for Visual Localization.
In IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, United States, June 2025.
[PDF]
[DATA+CODE]
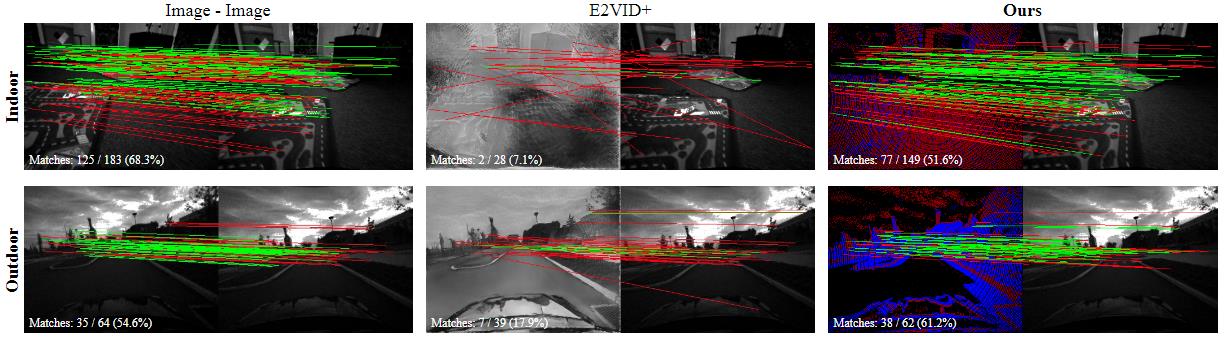
Z. Yi, H. Shi, Q. Jiang, K. Yang, Z. Wang, D. Gu, Y. Zhang, K. Wang.
EI-Nexus: Towards Unmediated and Flexible Inter-Modality Local Feature Extraction and Matching for Event-Image Data.
In IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), Tucson, AZ, United States, February 2025.
[PDF]
[DATA+CODE]
2024 折叠
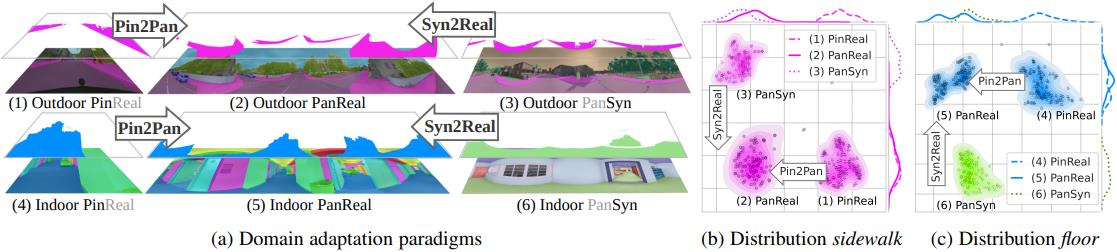
J. Zhang, K. Yang, H. Shi, S. Reiß, K. Peng, C. Ma, H. Fu, P.H.S. Torr, K. Wang, R.
Stiefelhagen.
Behind Every Domain There is a Shift: Adapting Distortion-aware Vision Transformers for Panoramic Semantic Segmentation.
IEEE Transactions on Pattern Analysis and Machine Intelligence, 2024.
[PDF]
[DATA+CODE]
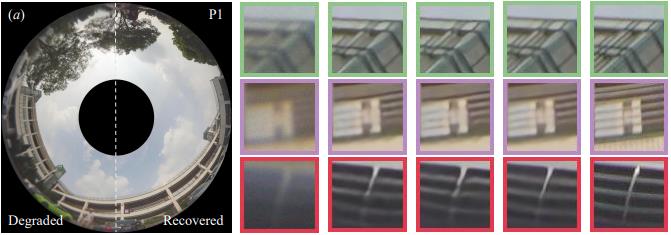
Q. Jiang, S. Gao, Y. Gao, K. Yang, Z. Yi, H. Shi, L. Sun, K. Wang.
Minimalist and High-Quality Panoramic Imaging with PSF-aware Transformers.
IEEE Transactions on Image Processing, 2024.
[PDF]
[DATA+CODE]
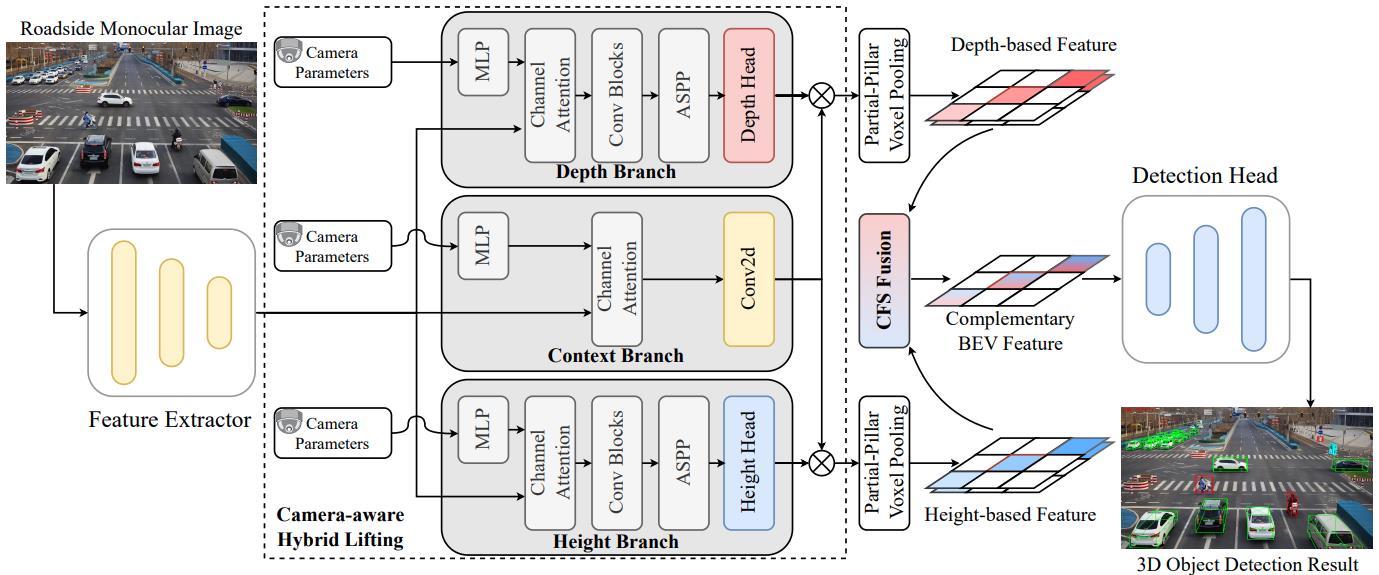
H. Shi, C. Pang, J. Zhang, K. Yang, Y. Wu, H. Ni, Y. Lin, R. Stiefelhagen, K. Wang.
CoBEV: Elevating Roadside 3D Object Detection with Depth and Height Complementarity.
IEEE Transactions on Image Processing, 2024.
[PDF]
[CODE]
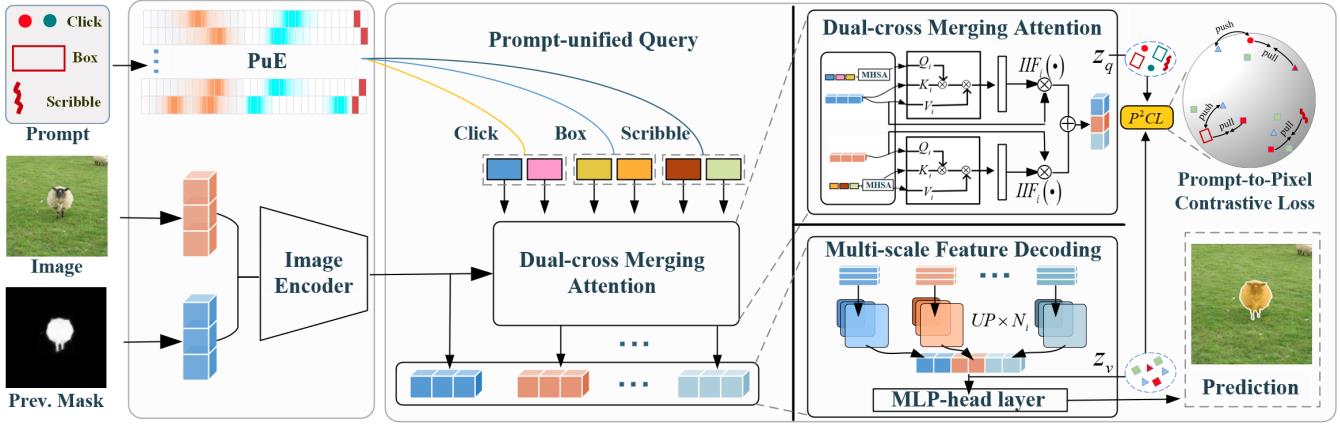
X. Zhang, K. Yang, J. Lin, J. Yuan, Z. Li, S. Li.
PVPUFormer: Probabilistic Visual Prompt Unified Transformer for Interactive Image Segmentation.
IEEE Transactions on Image Processing, 2024.
[PDF]
[CODE]
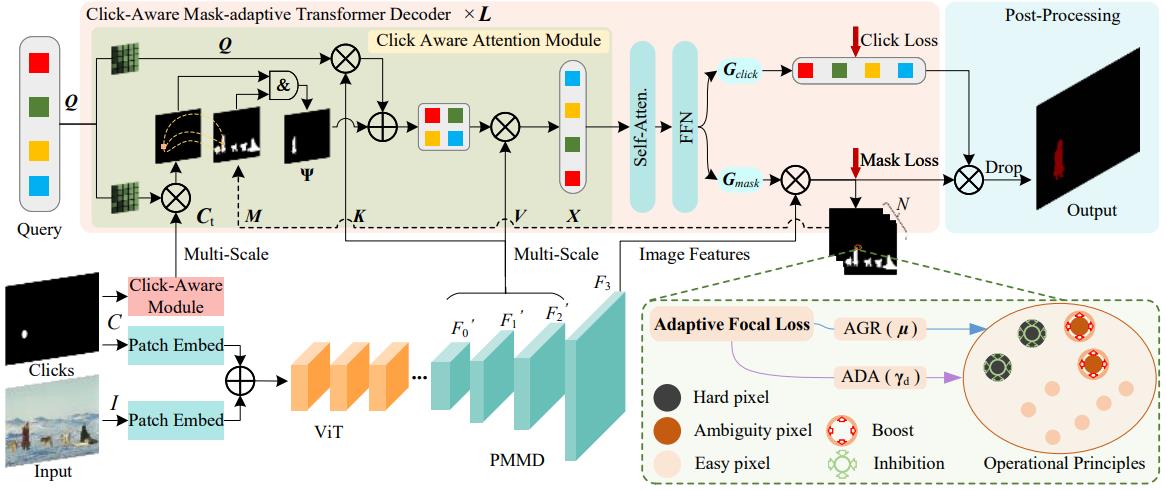
J. Lin, J. Chen, K. Yang, A. Roitberg, S. Li, Z. Li, S. Li.
AdaptiveClick: Clicks-aware Transformer with Adaptive Focal Loss for Interactive Image Segmentation.
IEEE Transactions on Neural Networks and Learning Systems, 2024.
[PDF]
[CODE]
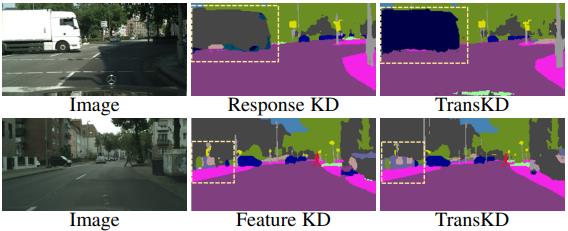
R. Liu, K. Yang, A. Roitberg, J. Zhang, K. Peng, H. Liu, Y. Wang, R. Stiefelhagen.
TransKD: Transformer Knowledge Distillation for Efficient Semantic Segmentation.
IEEE Transactions on Intelligent Transportation Systems, 2024.
[PDF]
[CODE]
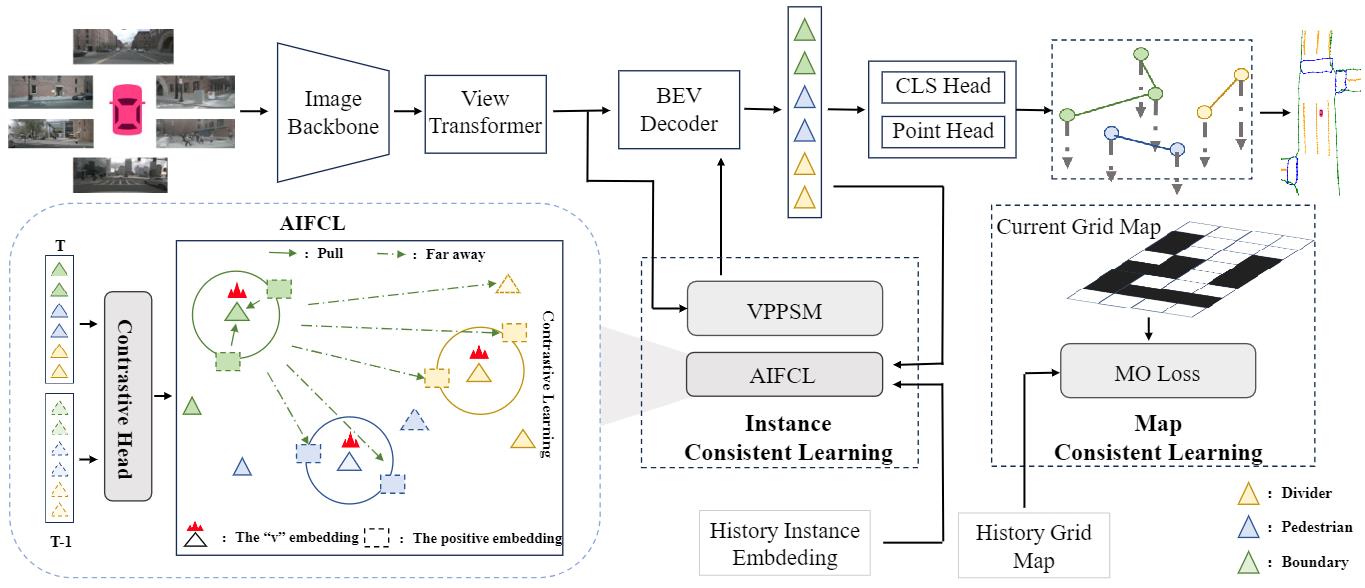
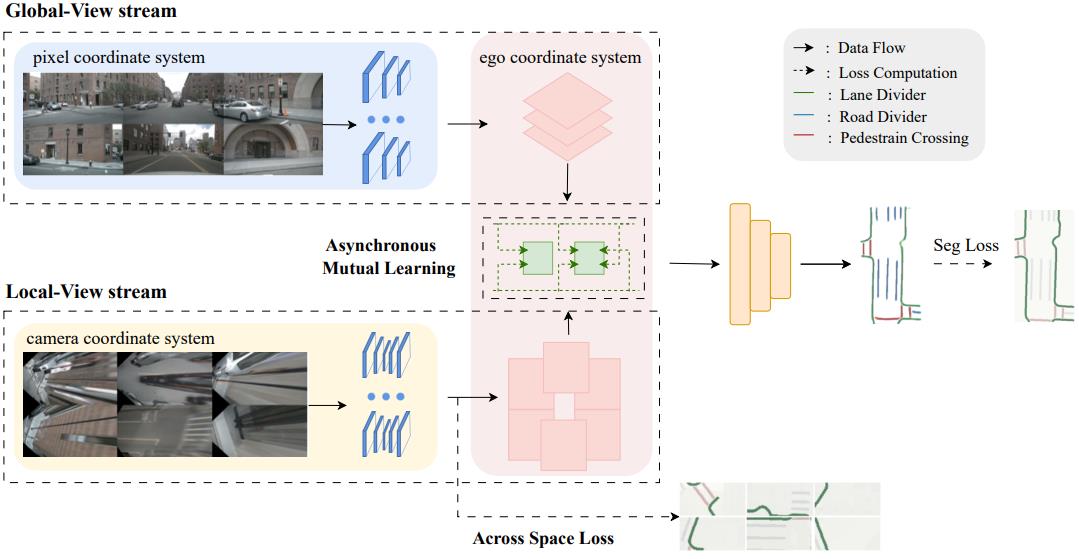
S. Li, J. Lin, H. Shi, J. Zhang, S. Wang, Y. Yao, Z. Li, K. Yang.
DTCLMapper: Dual Temporal Consistent Learning for Vectorized HD Map Construction.
IEEE Transactions on Intelligent Transportation Systems, 2024.
[PDF]
[CODE]
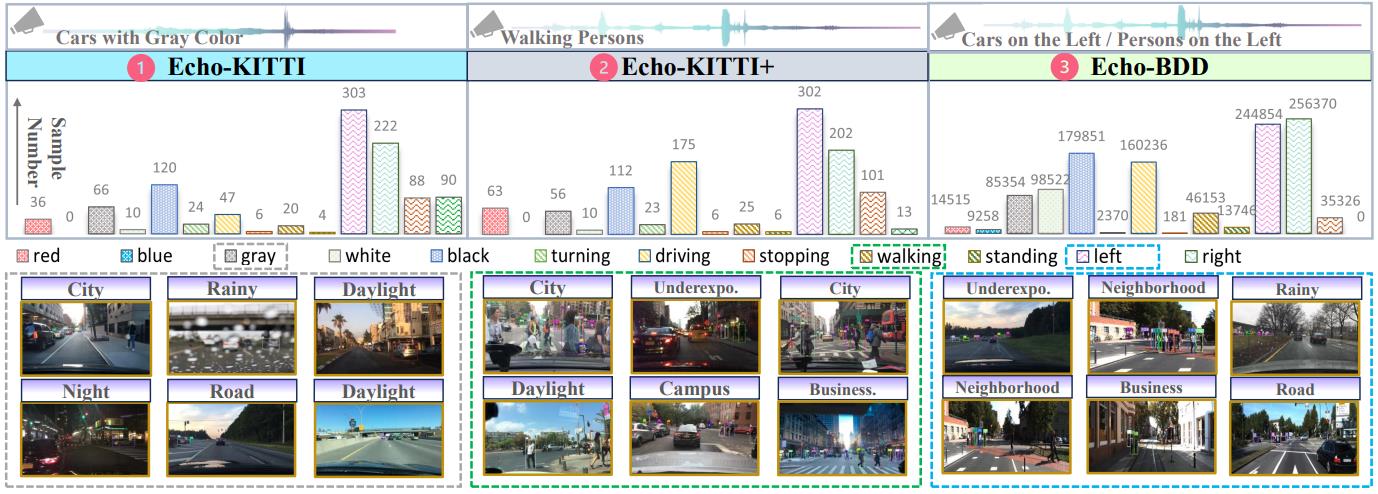
J. Lin, J. Chen, K. Peng, X. He, Z. Li, R. Stiefelhagen, K. Yang.
EchoTrack: Auditory Referring Multi-Object Tracking for Autonomous Driving.
IEEE Transactions on Intelligent Transportation Systems, 2024.
[PDF]
[VIDEO]
[DATA+CODE]

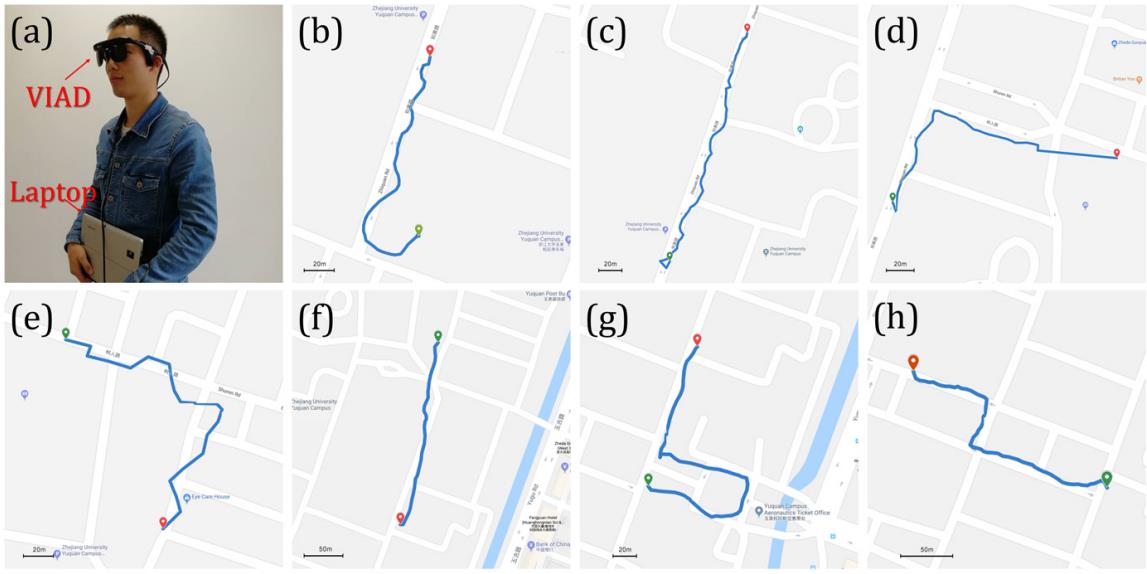
Z. Wang, K. Yang, H. Shi, Y. Zhang, Z. Xu, F. Gao, K. Wang.
LF-PGVIO: A Visual-Inertial-Odometry Framework for Large Field-of-View Cameras using Points and Geodesic Segments.
IEEE Transactions on Intelligent Vehicles, 2024.
[PDF]
[CODE]
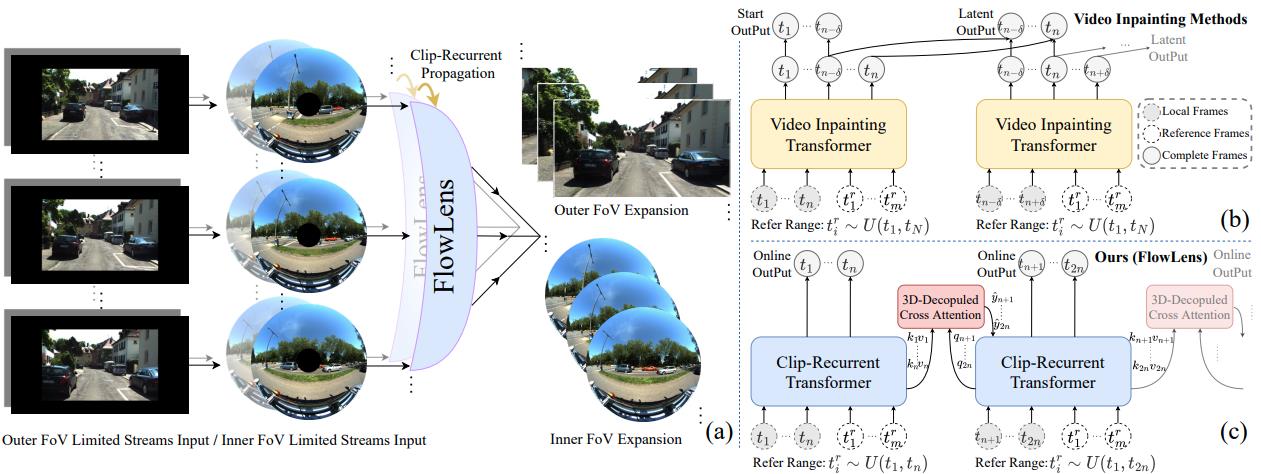
H. Shi, Q. Jiang, K. Yang, X. Yin, Z. Wang, K. Wang.
Beyond the Field-of-View: Enhancing Scene Visibility and Perception with Clip-Recurrent Transformer.
IEEE Transactions on Intelligent Vehicles, 2024.
[PDF]
[DATA+CODE]
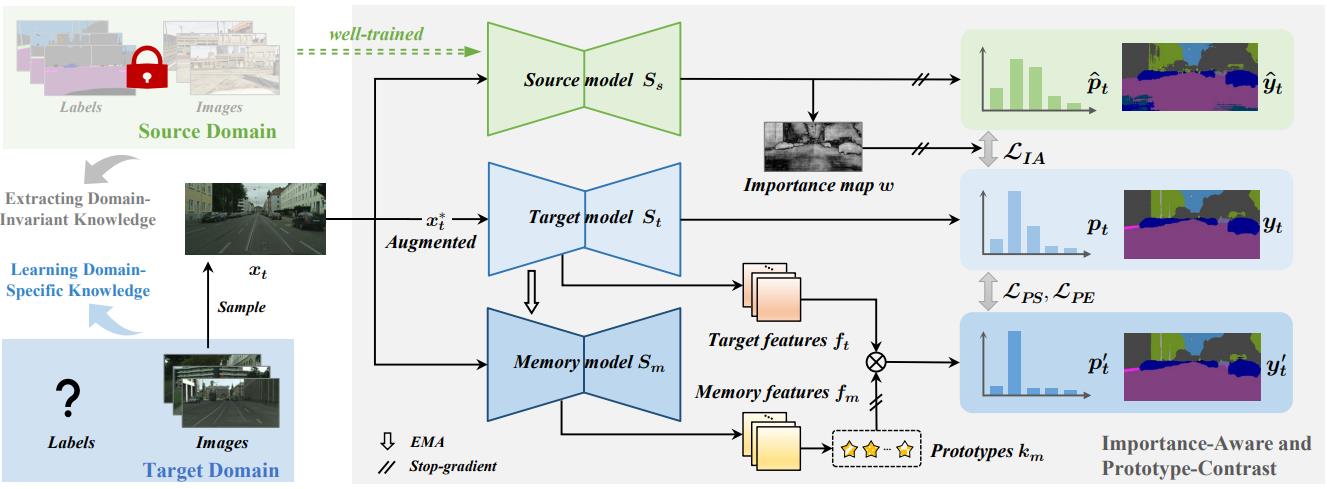
Y. Cao, H. Zhang, X. Lu, Z. Xiao, K. Yang, Y. Wang.
Towards Source-free Domain Adaptive Semantic Segmentation via Importance-aware and Prototype-contrast Learning.
IEEE Transactions on Intelligent Vehicles, 2024.
[PDF]
[CODE]
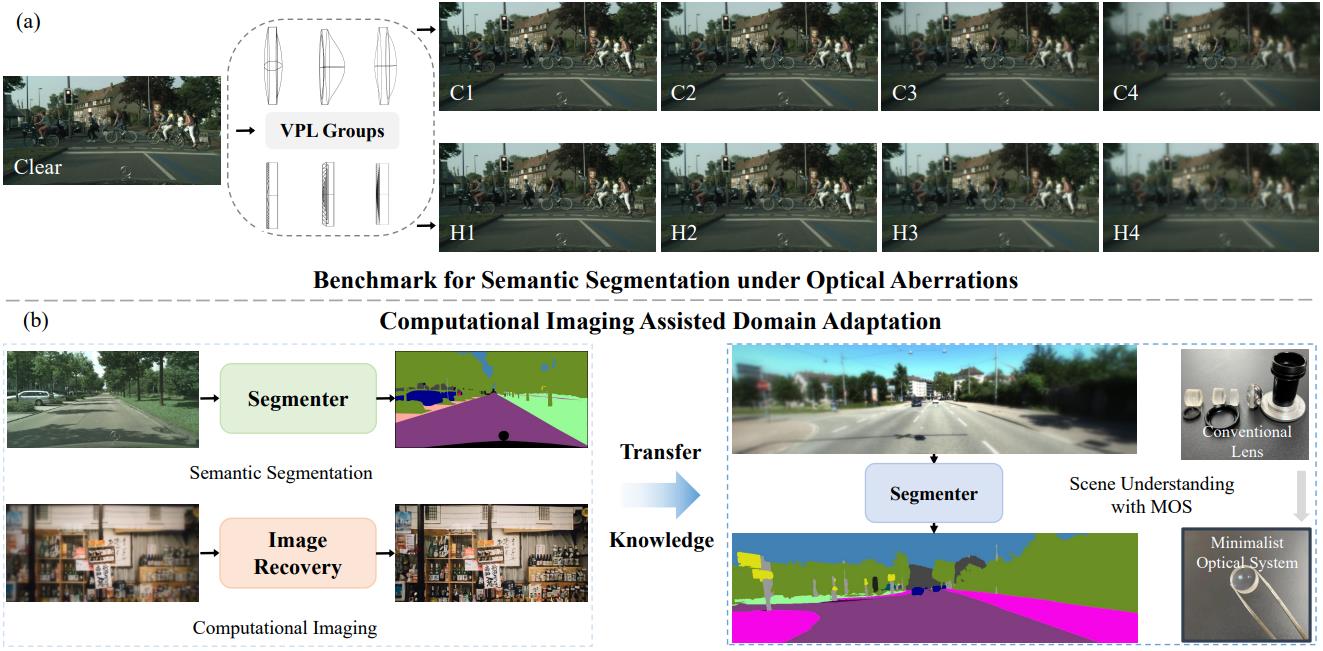
Q. Jiang, H. Shi, S. Gao, J. Zhang, K. Yang, L. Sun, H. Ni, K. Wang.
Computational Imaging for Machine Perception: Transferring Semantic Segmentation beyond Aberrations.
IEEE Transactions on Computational Imaging, 2024.
[PDF]
[DATA]
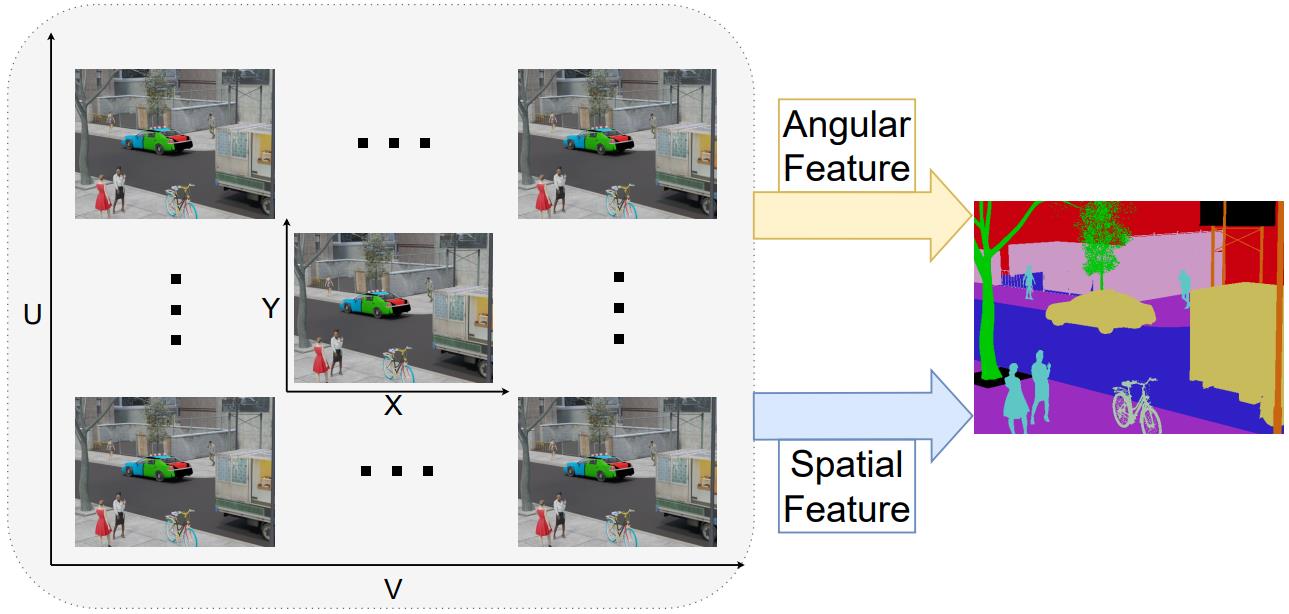
F. Teng, J. Zhang, K. Peng, Y. Wang, R. Stiefelhagen, K. Yang.
OAFuser: Towards Omni-Aperture Fusion for Light Field Semantic Segmentation.
IEEE Transactions on Artificial Intelligence, 2024.
[PDF]
[CODE]
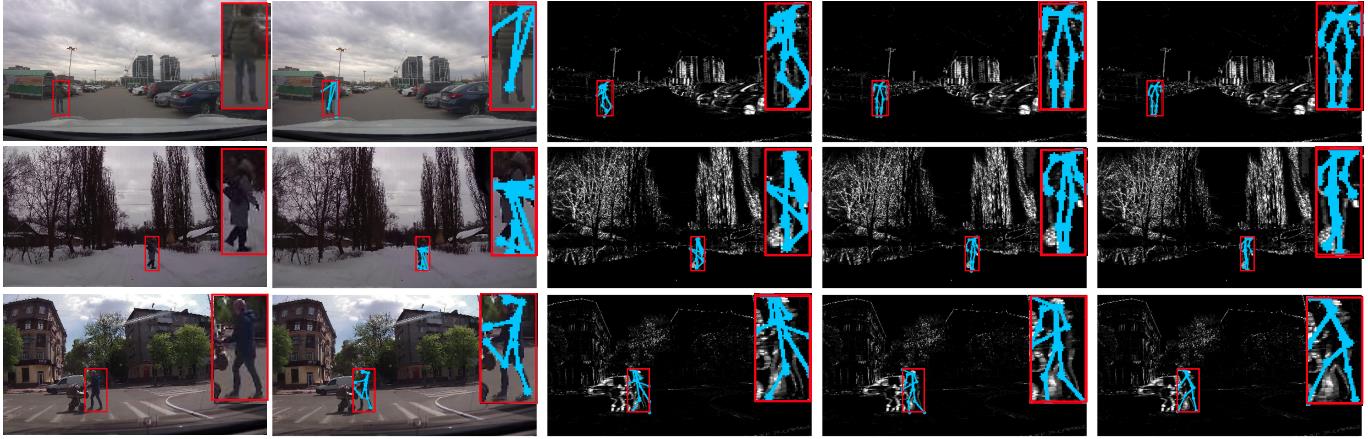
X. Yin, H. Shi, J. Chen, Z. Wang, Y. Ye, K. Yang, K. Wang.
Exploring Event-based Human Pose Estimation with 3D Event Representations.
Computer Vision and Image Understanding, 2024.
[PDF]
[VIDEO]
[DATA+CODE]
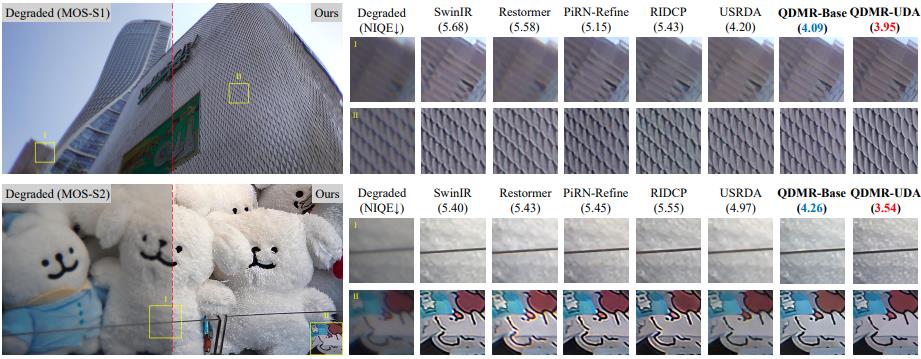
Q. Jiang, Z. Yi, S. Gao, Y. Gao, X. Qian, H. Shi, L. Sun, J. Niu, K. Wang, K. Yang, J. Bai.
Representing Domain-Mixing Optical Degradation for Real-World Computational Aberration Correction via Vector Quantization.
Optics & Laser Technology, 2024.
[PDF]
[DATA+CODE]
S. Gao, Q. Jiang, Y. Liao, Y. Qiu, W. Ying, K. Yang, K. Wang, B. Zhang, J. Bai.
Design, analysis, and manufacturing of a glass-plastic hybrid minimalist aspheric panoramic annular lens.
Optics & Laser Technology, 2024.
[PDF]
K. Peng, D. Wen, K. Yang, A. Luo, Y. Chen, J. Fu, M.S. Sarfraz, A. Roitberg, R. Stiefelhagen.
Advancing Open-Set Domain Generalization Using Evidential Bi-Level Hardest Domain Schedulers.
In Conference on Neural Information Processing Systems (NeurIPS), Vancouver, BC, Canada, December 2024.
[PDF]
[CODE]
F. Teng, J. Zhang, J. Liu, K. Peng, X. Cheng, Z. Li, K. Yang.
LF Tracy: A Unified Single-Pipeline Approach for Salient Object Detection in Light Field Cameras.
In International Conference on Pattern Recognition (ICPR), Kolkata, India, December 2024.
[PDF]
[CODE]
Y. Xu, K. Peng, D. Wen, R. Liu, J. Zheng, Y. Chen, J. Zhang, A. Roitberg, K. Yang, R. Stiefelhagen.
Skeleton-Based Human Action Recognition with Noisy Labels.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi, United Arab Emirates, October 2024.
[PDF]
[CODE]
K. Peng, D. Schneider, A. Roitberg, K. Yang, J. Zhang, C. Deng, K. Zhang, M.S. Sarfraz, R. Stiefelhagen.
Towards Video-based Activated Muscle Group Estimation in the Wild.
In ACM International Conference on Multimedia (MM), Melbourne, Australia, October 2024.
[PDF]
[DATA+CODE]
K. Zeng, H. Shi, J. Lin, S. Li, J. Cheng, K. Wang, Z. Li, K. Yang.
MambaMOS: LiDAR-based 3D Moving Object Segmentation with Motion-aware State Space Model.
In ACM International Conference on Multimedia (MM), Melbourne, Australia, October 2024.
[PDF]
[CODE]

K. Luo, H. Wu, K. Yi, K. Yang, W. Hao, R. Hu.
Towards Consistent Object Detection via LiDAR-Camera Synergy.
In IEEE International Conference on Systems, Man, and Cybernetics (SMC), Sarawak, Malaysia, October 2024.
[PDF]
[CODE]
Y. Cao, J. Zhang, H. Shi, K. Peng, Y. Zhang, H. Zhang, R. Stiefelhagen, K. Yang.
Occlusion-Aware Seamless Segmentation.
In European Conference on Computer Vision (ECCV), Milan, Italy, September 2024.
[PDF]
[DATA+CODE]
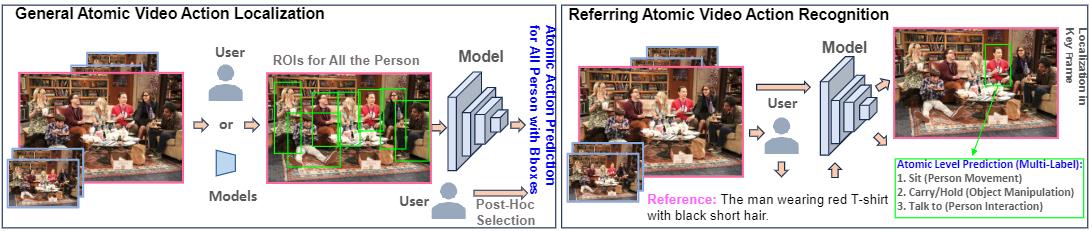
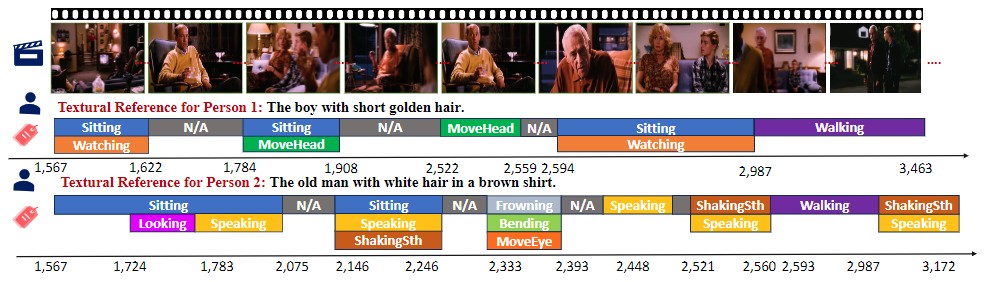
K. Peng, J. Fu, K. Yang, D. Wen, Y. Chen, R. Liu, J. Zheng, J. Zhang, M.S. Sarfraz, R. Stiefelhagen, A. Roitberg.
Referring Atomic Video Action Recognition.
In European Conference on Computer Vision (ECCV), Milan, Italy, September 2024.
[PDF]
[DATA+CODE]
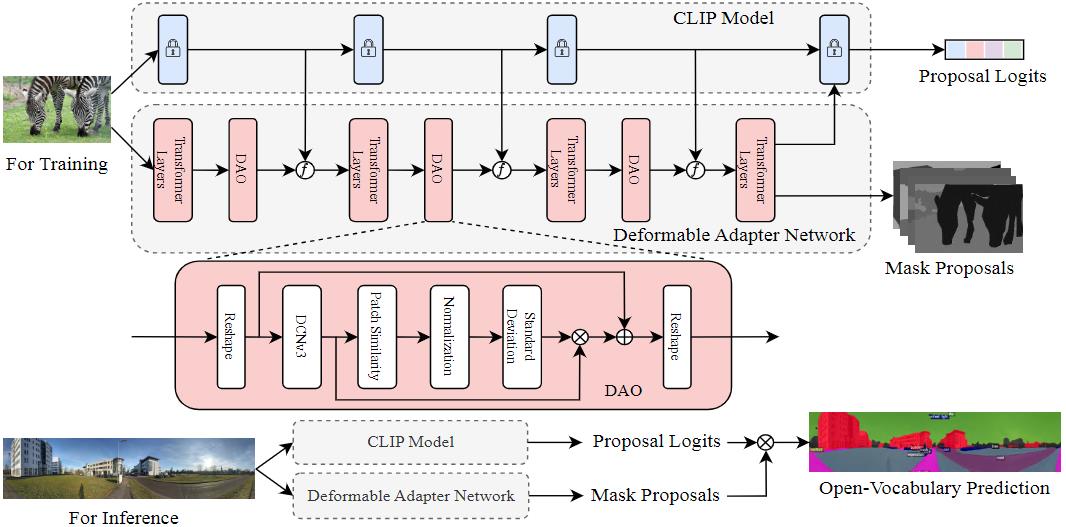
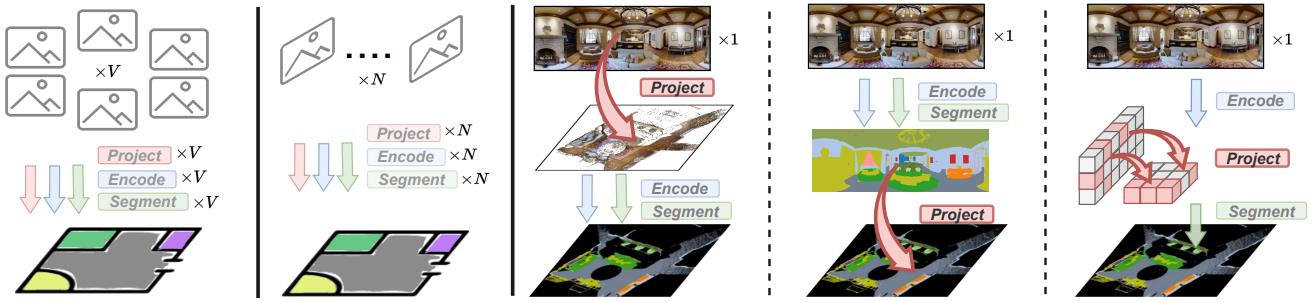
J. Zheng, R. Liu, Y. Chen, K. Peng, C. Wu, K. Yang, J. Zhang, R. Stiefelhagen.
Open Panoramic Segmentation.
In European Conference on Computer Vision (ECCV), Milan, Italy, September 2024.
[PDF]
[CODE]
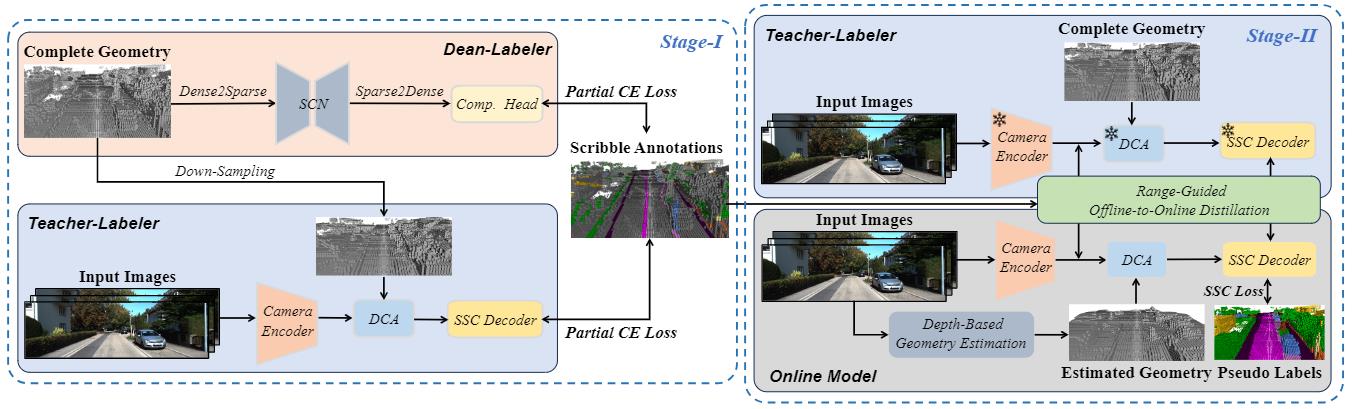
S. Wang, J. Yu, W. Li, H. Shi, K. Yang, J. Chen, J. Zhu.
Label-efficient Semantic Scene Completion with Scribble Annotations.
In International Joint Conference on Artificial Intelligence (IJCAI), Jeju, Korea, August 2024.
[PDF]
[CODE]
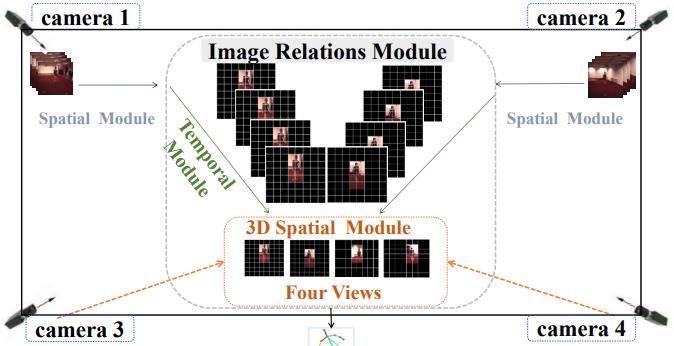
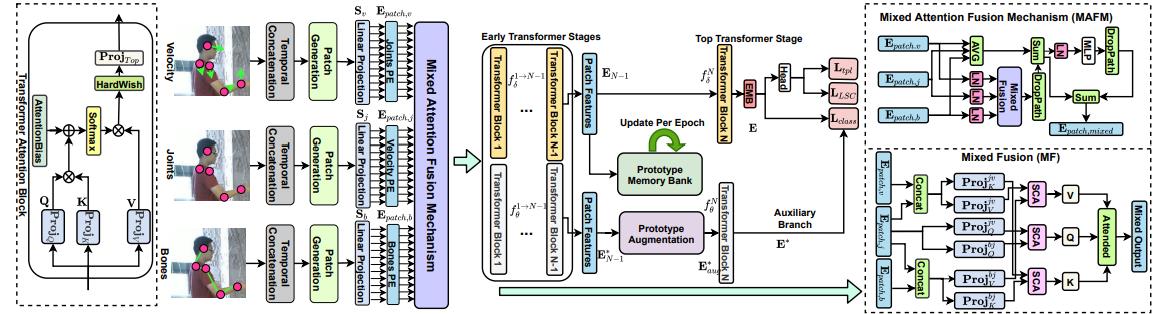
J. Jiao, X. Cheng, W. Chen, X. Yin, H. Shi, K. Yang.
Towards Precise 3D Human Pose Estimation with Multi-Perspective Spatial-Temporal Relational Transformers.
In International Joint Conference on Neural Networks (IJCNN), Yokohama, Japan, June 2024.
[PDF]
[CODE]
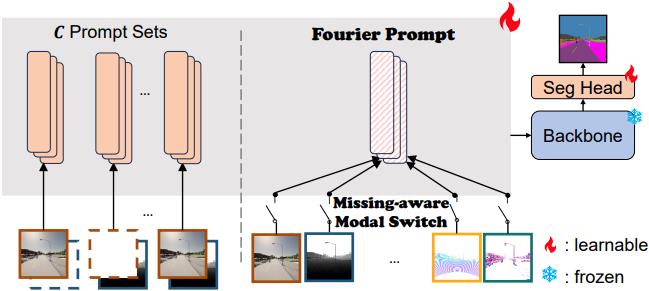
R. Liu, J. Zhang, K. Peng, Y. Chen, K. Cao, J. Zheng, M.S. Sarfraz, K. Yang, R. Stiefelhagen.
Fourier Prompt Tuning for Modality-Incomplete Scene Segmentation.
In IEEE Intelligent Vehicles Symposium (IV), Jeju Island, Korea, June 2024.
[PDF]
[CODE]
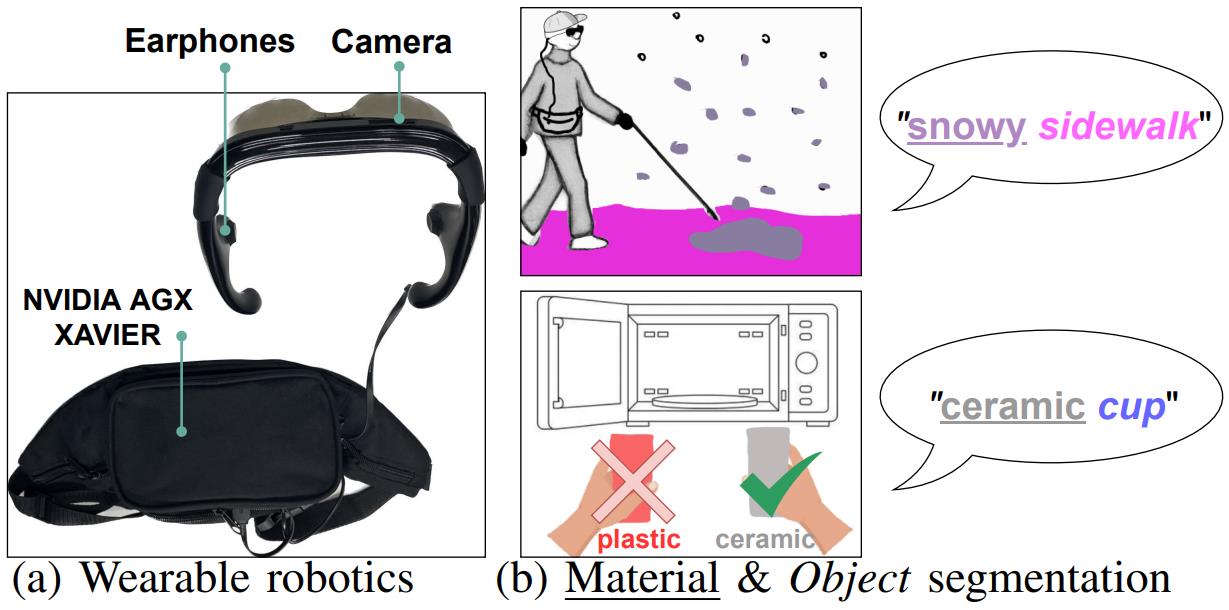
J. Zheng, J. Zhang, K. Yang, K. Peng, R. Stiefelhagen.
MateRobot: Material Recognition in Wearable Robotics for People with Visual Impairments.
In IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, May 2024.
[Finalist for Best Paper Award on HRI]
[PDF]
[VIDEO]
[CODE]
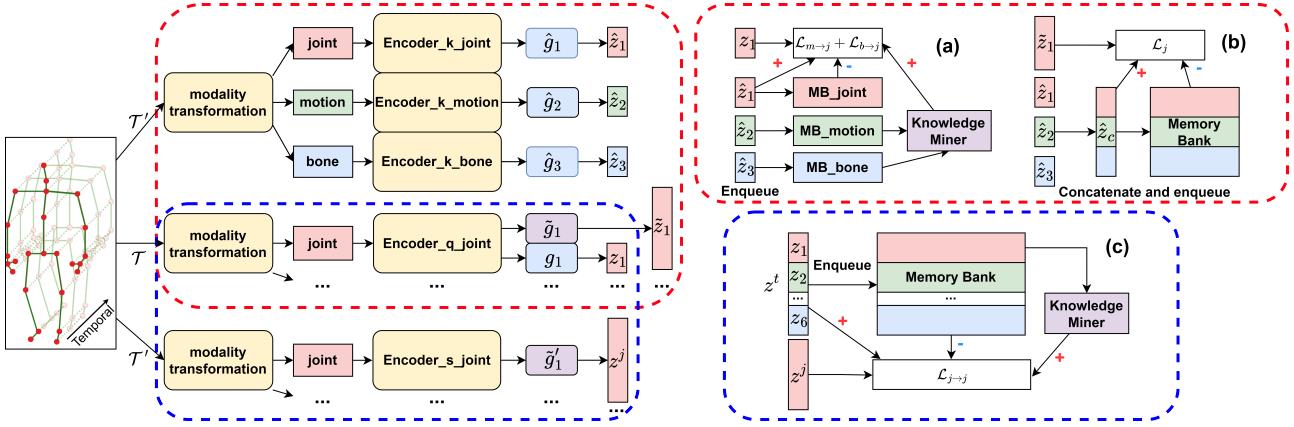
Y. Wei, K. Peng, A. Roitberg, J. Zhang, J. Zheng, R. Liu, Y. Chen, K. Yang, R. Stiefelhagen.
Elevating Skeleton-based Action Recognition with Efficient Multi-modality Self-supervision.
In IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Seoul, Korea, April 2024.
[PDF]
[CODE]
K. Peng, C. Yin, J. Zheng, R. Liu, D. Schneider, J. Zhang, K. Yang, M.S. Sarfraz, R. Stiefelhagen, A. Roitberg.
Navigating Open Set Scenarios for Skeleton-based Action Recognition.
In AAAI Conference on Artificial Intelligence (AAAI), Vancouver, BC, Canada, February 2024.
[PDF]
[DATA+CODE]
Z. Teng, J. Zhang, K. Yang, K. Peng, H. Shi, S. Reiß, K. Cao, R. Stiefelhagen.
360BEV: Panoramic Semantic Mapping for Indoor Bird's-Eye View.
In IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, United States, January 2024.
[PDF]
[DATA+CODE]
2023 折叠
J. Zhang, H. Liu, K. Yang, X. Hu, R. Liu, R. Stiefelhagen.
CMX: Cross-Modal Fusion for RGB-X Semantic Segmentation with Transformers.
IEEE Transactions on Intelligent Transportation Systems, 2023.
[PDF]
[CODE]
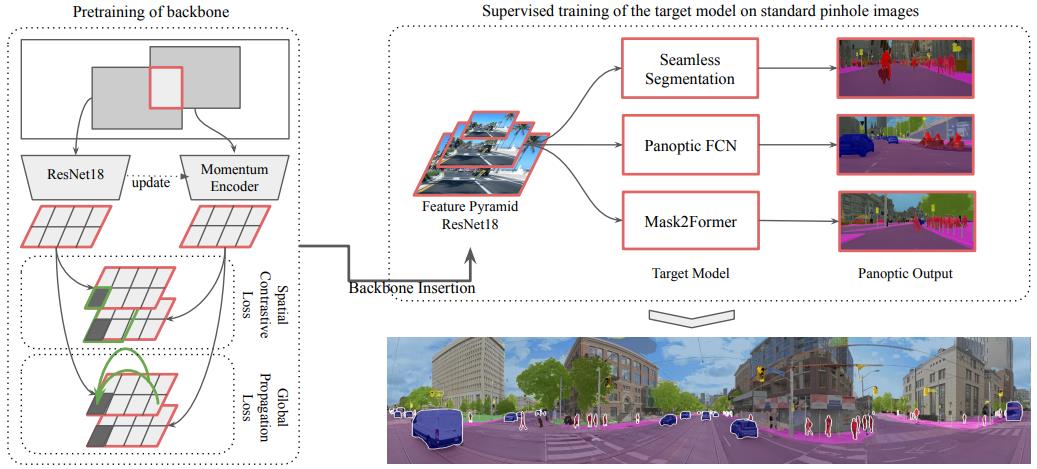
A. Jaus, K. Yang, R. Stiefelhagen.
Panoramic Panoptic Segmentation: Insights Into Surrounding Parsing for Mobile Agents via Unsupervised Contrastive Learning.
IEEE Transactions on Intelligent Transportation Systems, 2023.
[PDF]
[DATA+CODE]
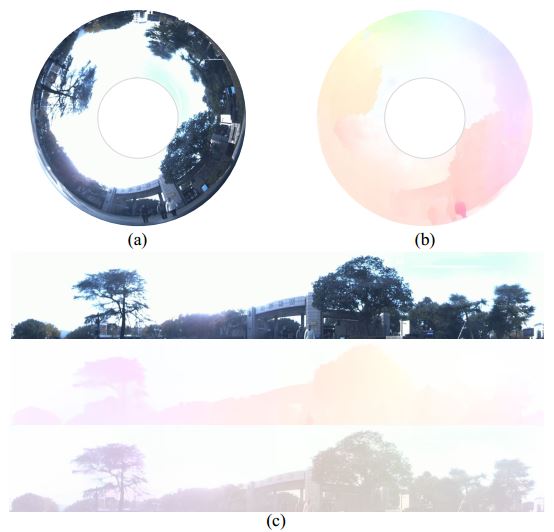
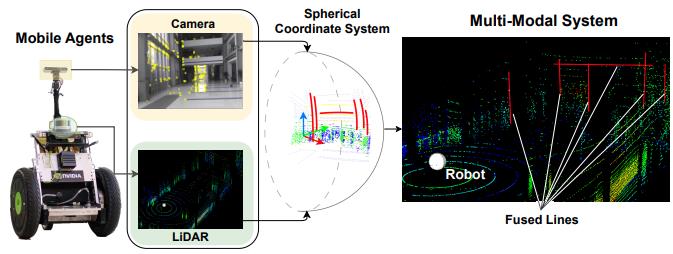
H. Shi, Y. Zhou, K. Yang, X. Yin, Z. Wang, Y. Ye, Z. Yin, S. Meng, P. Li, K. Wang.
PanoFlow: Learning 360° Optical Flow for Surrounding Temporal Understanding.
IEEE Transactions on Intelligent Transportation Systems, 2023.
[PDF]
[VIDEO]
[DATA+CODE]
K. Peng, A. Roitberg, K. Yang, J. Zhang, R. Stiefelhagen.
Delving Deep into One-Shot Skeleton-based Action Recognition with Diverse Occlusions.
IEEE Transactions on Multimedia, 2023.
[PDF]
[DATA+CODE]
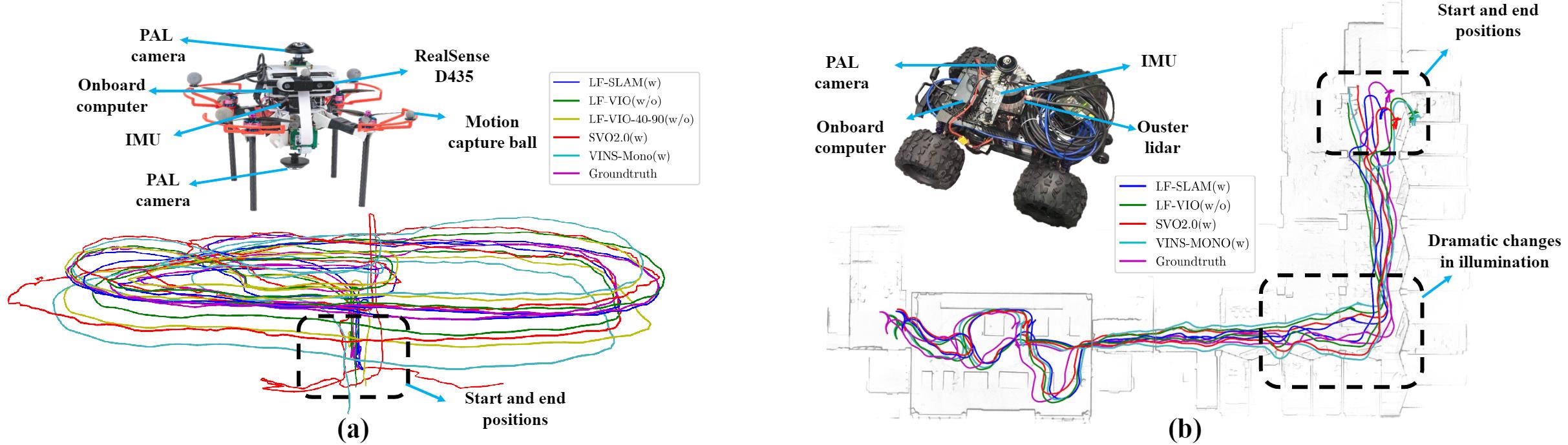
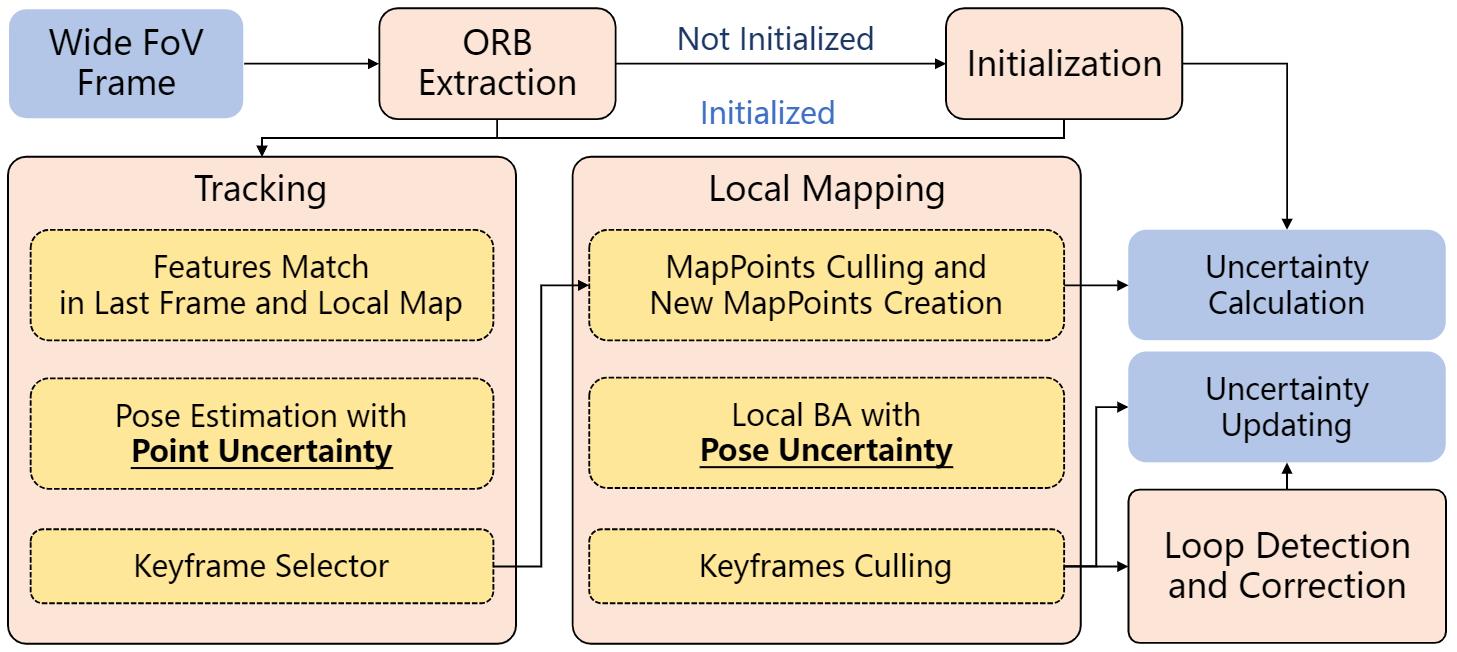
Z. Wang, K. Yang, H. Shi, P. Li, F. Gao, J. Bai, K. Wang.
LF-VISLAM: A SLAM Framework for Large Field-of-View Cameras with Negative Imaging Plane on Mobile Agents.
IEEE Transactions on Automation Science and Engineering, 2023.
[PDF]
[DATA+CODE]
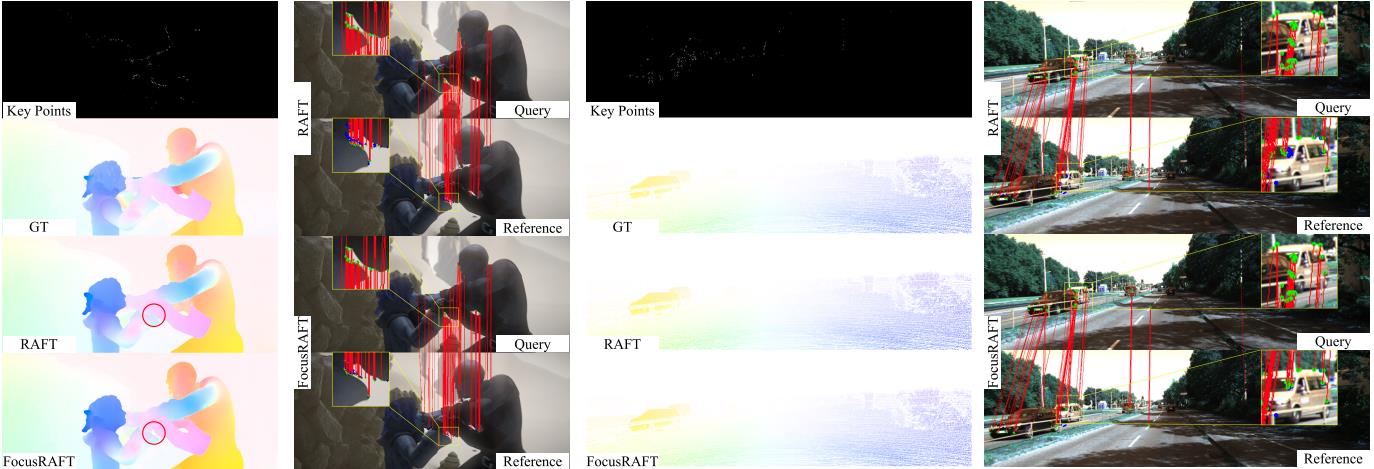
Z. Yi, H. Shi, K. Yang, Q. Jiang, Y. Ye, Z. Wang, H. Ni, K. Wang.
FocusFlow: Boosting Key-Points Optical Flow Estimation for Autonomous Driving.
IEEE Transactions on Intelligent Vehicles, 2023.
[PDF]
[CODE]
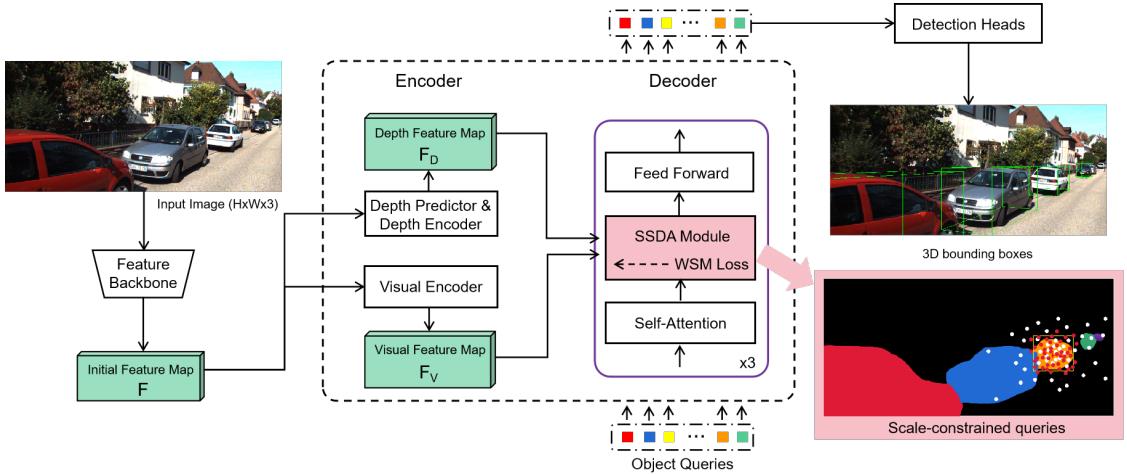
X. He, F. Yang, K. Yang, J. Lin, H. Fu, M. Wang, J. Yuan, Z. Li.
SSD-MonoDETR: Supervised Scale-aware Deformable Transformer for Monocular 3D Object Detection.
IEEE Transactions on Intelligent Vehicles, 2023.
[PDF]
[CODE]
S. Li, K. Yang, H. Shi, J. Zhang, J. Lin, Z. Teng, Z. Li.
Bi-Mapper: Holistic BEV Semantic Mapping for Autonomous Driving.
IEEE Robotics and Automation Letters, 2023.
[PDF]
[CODE]
K. Cao, R. Liu, Z. Wang, K. Peng, J. Zhang, J. Zheng, Z. Teng, K. Yang, R.
Stiefelhagen.
Tightly-Coupled LiDAR-Visual SLAM Based on Geometric Features for
Mobile Agents.
In IEEE International Conference on Robotics and Biomimetics (ROBIO), Samui, Thailand,
December 2023.
[PDF]
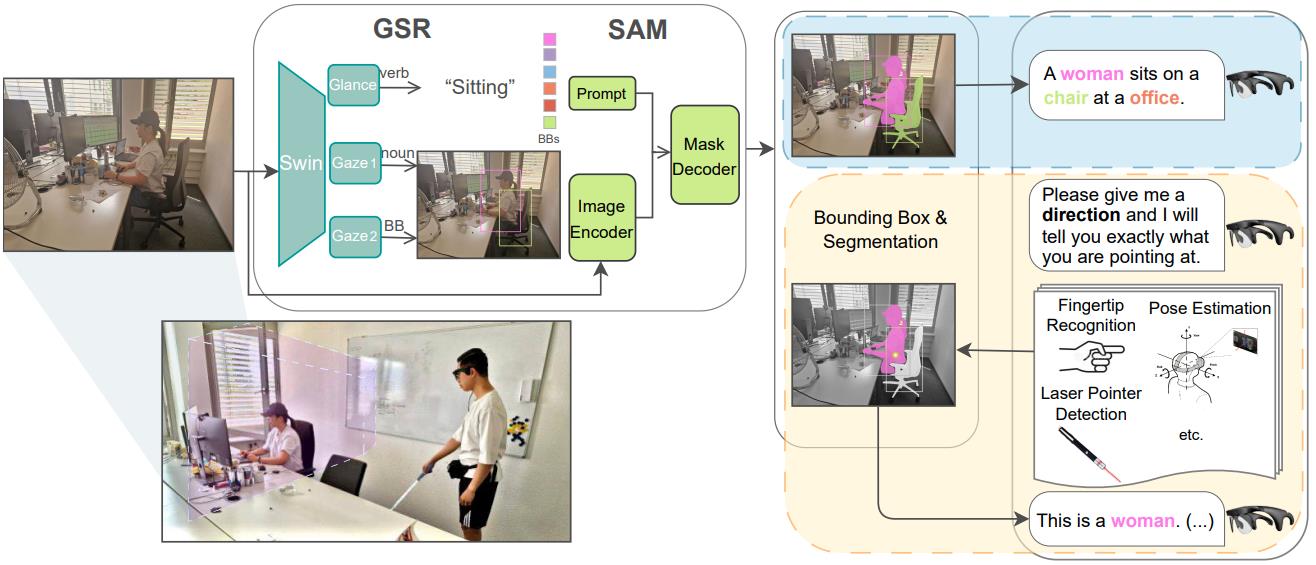
R. Liu, J. Zhang, K. Peng, J. Zheng, K. Cao, Y. Chen, K. Yang, R. Stiefelhagen.
Open Scene Understanding: Grounded Situation Recognition Meets
Segment Anything for Helping People with Visual Impairments.
In International Workshop on Assistive Computer Vision and Robotics (ACVR) with IEEE/CVF
International Conference on Computer Vision (ICCV), Paris, France, October 2023.
[PDF]
[CODE]
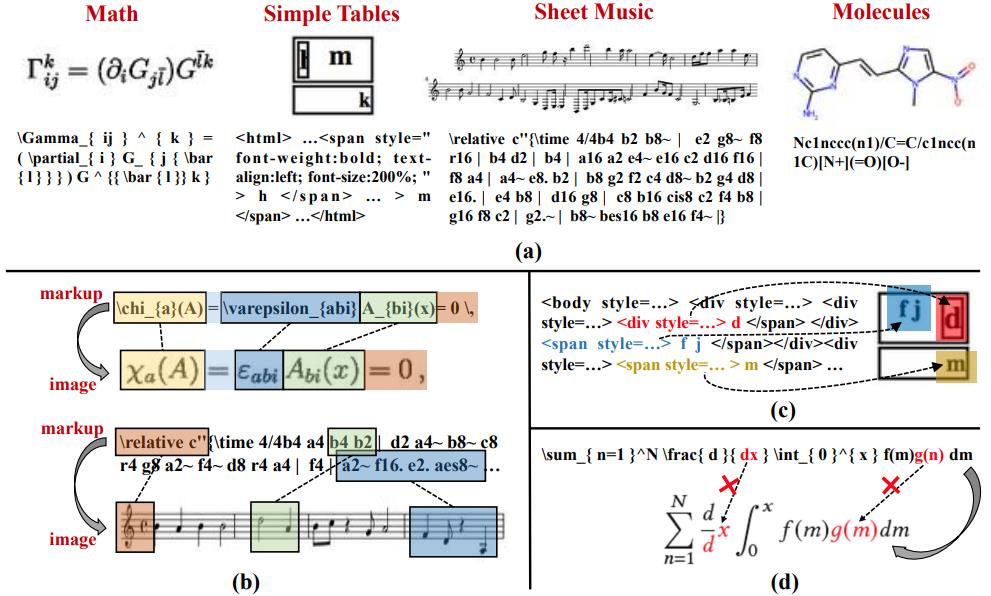
G. Zhong, J. Yuan, P. Wang, K. Yang, W. Guan, Z. Li.
Contrast-augmented Diffusion Model with Fine-grained Sequence
Alignment for Markup-to-Image Generation.
In ACM International Conference on Multimedia (MM), Ottawa, ON, Canada, October 2023.
[PDF]
[CODE]
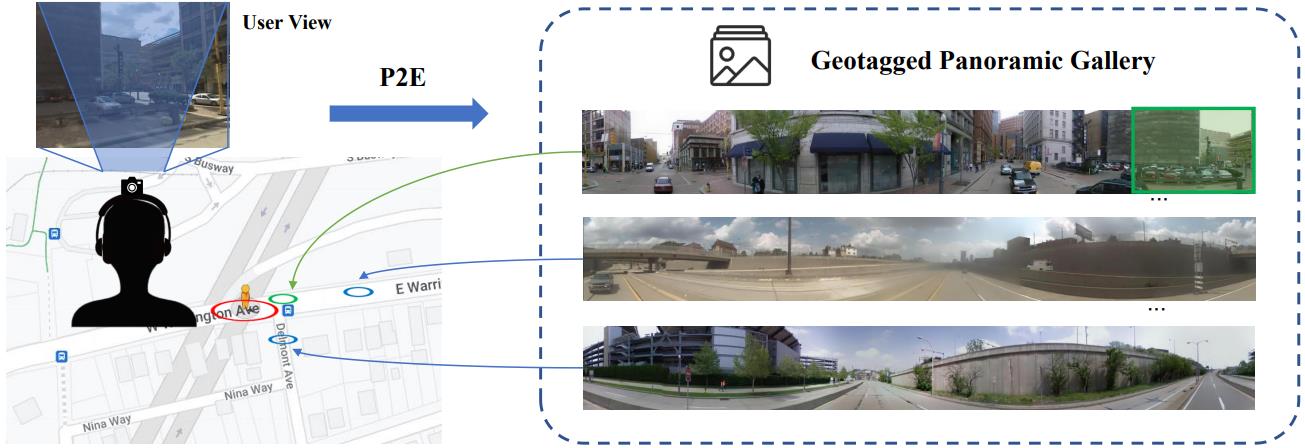
Z. Shi, H. Shi, K. Yang, Z. Yin, Y. Lin, K. Wang.
PanoVPR: Towards Unified Perspective-to-Equirectangular Visual
Place Recognition via Sliding Windows across the Panoramic View.
In IEEE International Conference on Intelligent Transportation Systems (ITSC), Bilbao,
Spain, September 2023.
[PDF]
[DATA+CODE]
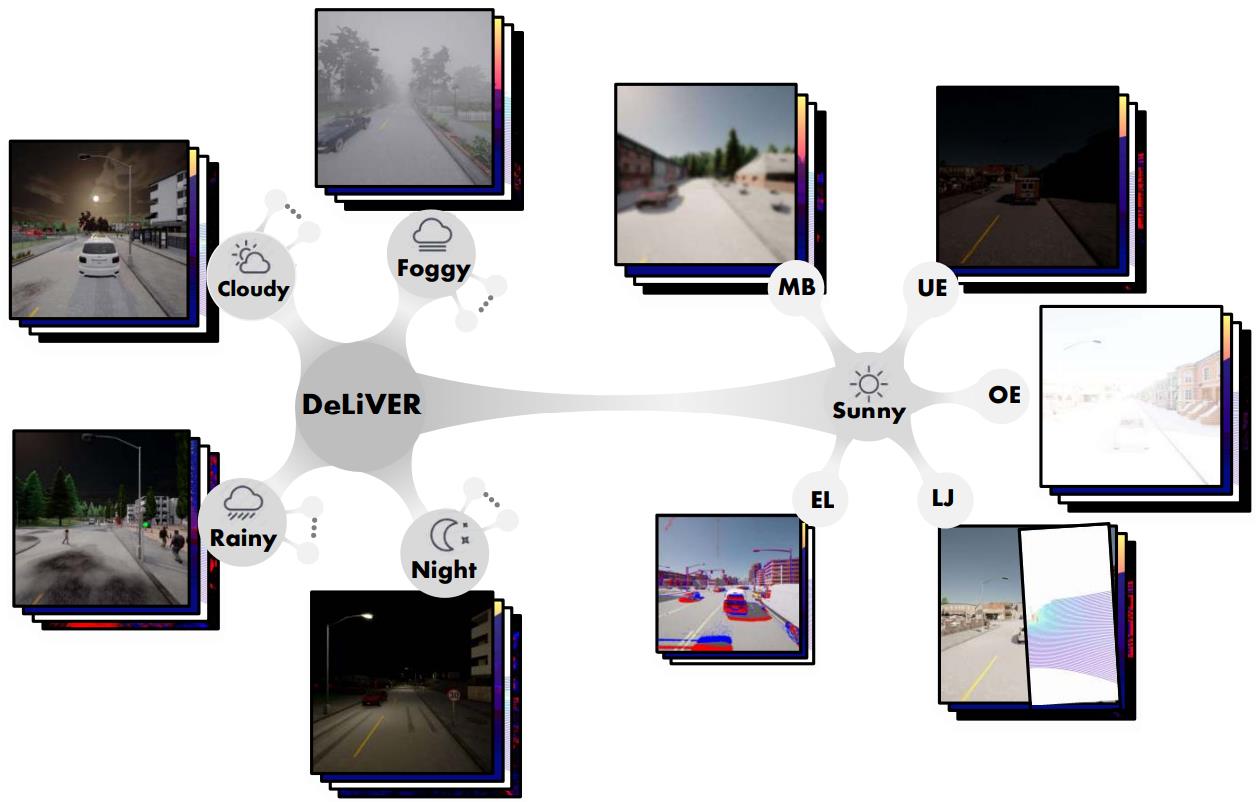
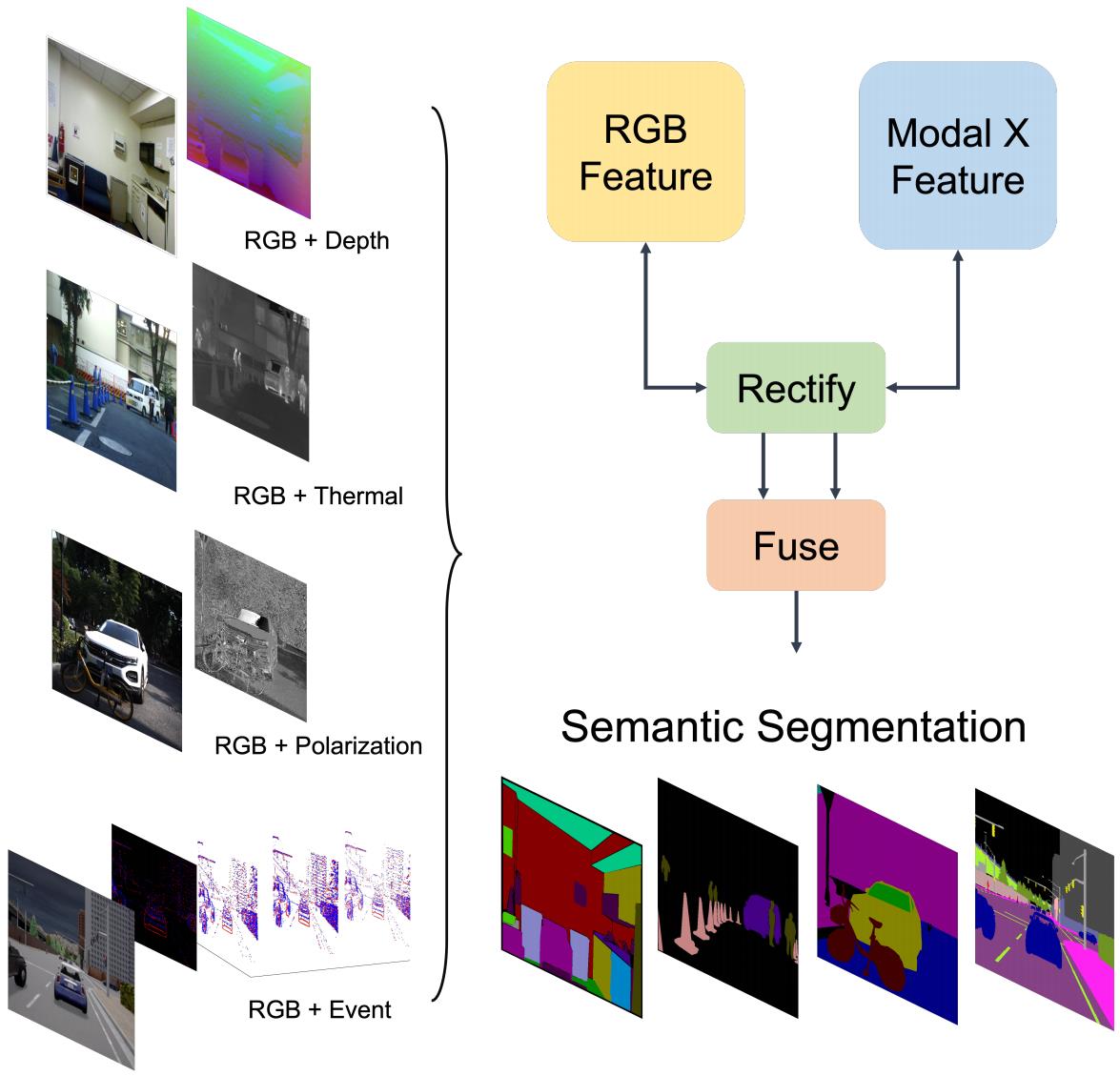
J. Zhang, R. Liu, H. Shi, K. Yang, S. Reiß, K. Peng, H. Fu, K. Wang, R. Stiefelhagen.
Delivering Arbitrary-Modal Semantic Segmentation.
In IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, June 2023.
[PDF]
[VIDEO]
[DATA+CODE]
H. Shi, Y. Li, K. Yang, J. Zhang, K. Peng, A. Roitberg, Y. Ye, H. Ni, K. Wang, R.
Stiefelhagen.
FishDreamer: Towards Fisheye Semantic Completion via Unified Image Outpainting and Segmentation.
In Omnidirectional Computer Vision (OmniCV) Workshop with IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, June 2023.
[PDF]
[DATA+CODE]
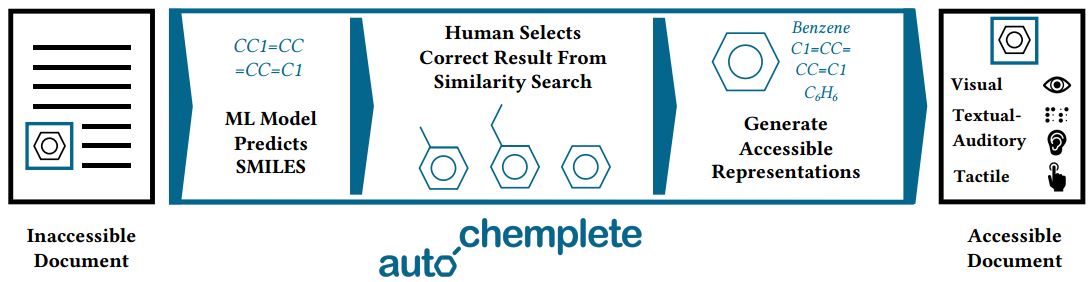
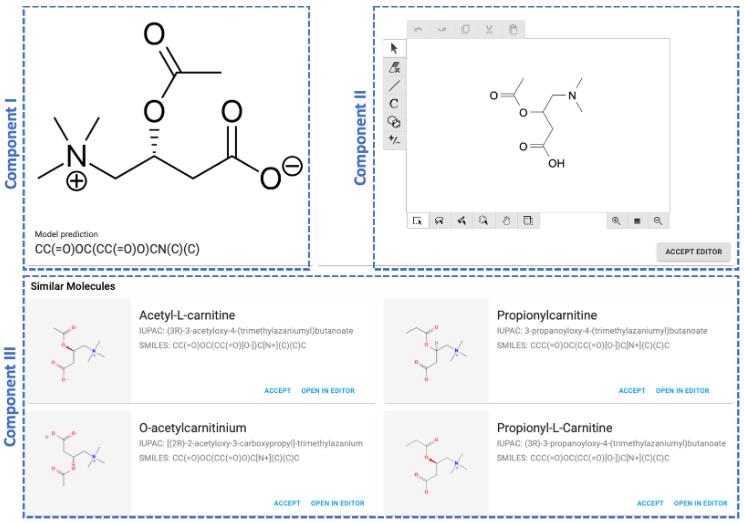
M. Knaeble, G. Sailer, Z. Chen, T. Schwarz, K. Yang, M. Nadj, R. Stiefelhagen, A.
Maedche.
AutoChemplete - Making Chemical Structural Formulas
Accessible.
In International Web for All Conference (W4A), Austin, TX, United States, April 2023.
[PDF]
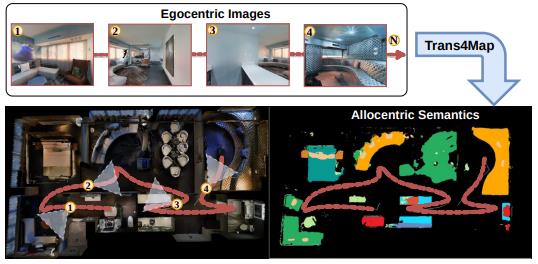
C. Chen, J. Zhang, K. Yang, K. Peng, R. Stiefelhagen.
Trans4Map: Revisiting Holistic Bird's-Eye-View Mapping from
Egocentric Images to Allocentric Semantics with Vision Transformers.
In IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI,
United States, January 2023.
[PDF]
[VIDEO]
[CODE]
2022 折叠
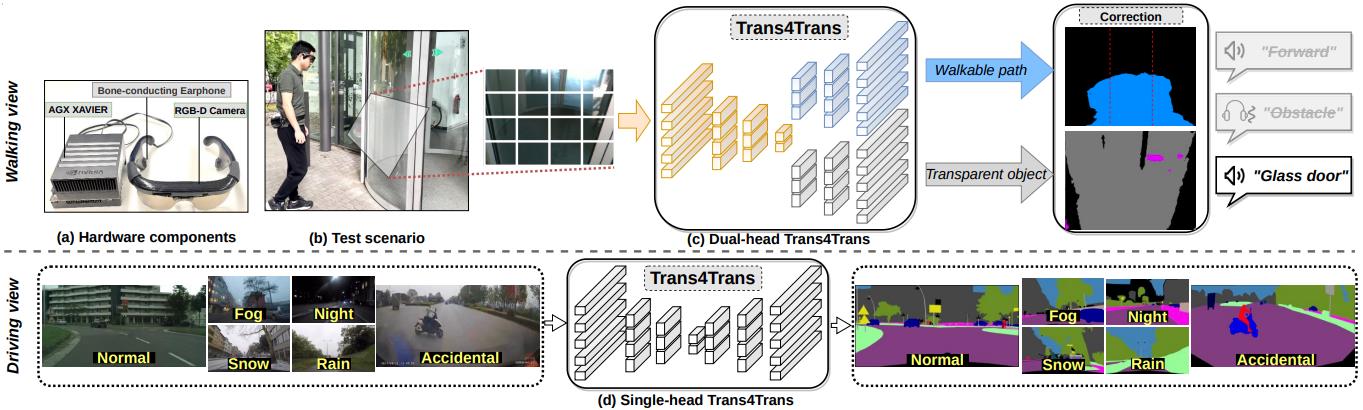
J. Zhang, K. Yang, A. Constantinescu, K. Peng, K. Müller, R. Stiefelhagen.
Trans4Trans: Efficient Transformer for Transparent Object and
Semantic Scene Segmentation in Real-World Navigation Assistance.
IEEE Transactions on Intelligent Transportation Systems, 2022.
[PDF]
[CODE]
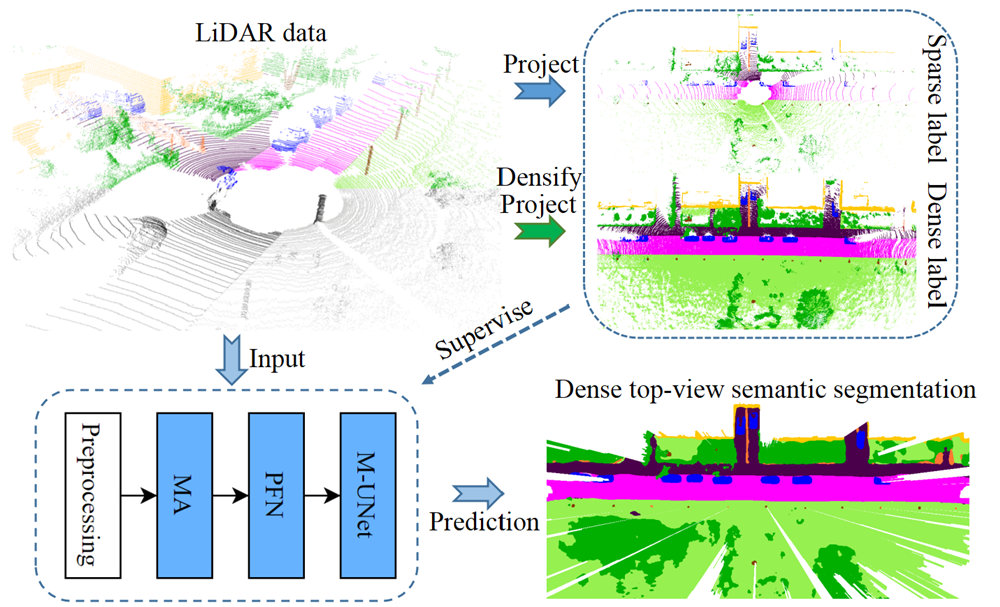
K. Peng, J. Fei, K. Yang, A. Roitberg, J. Zhang, F. Bieder, P. Heidenreich, C. Stiller,
R. Stiefelhagen.
MASS: Multi-Attentional Semantic Segmentation of LiDAR Data for
Dense Top-View Understanding.
IEEE Transactions on Intelligent Transportation Systems, 2022.
[PDF]
[VIDEO]
[CODE]
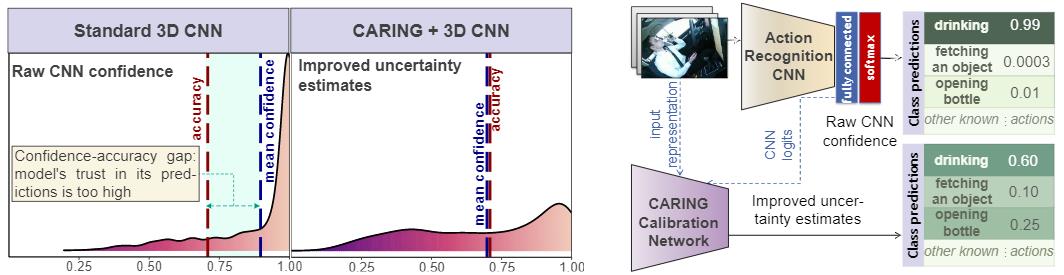
A. Roitberg, K. Peng, D. Schneider, K. Yang, M. Koulakis, M. Martinez, R.
Stiefelhagen.
Is my Model Overconfident? Towards Uncertainty-aware Driver
Observation with Reliable and Interpretable Confidence Estimates.
IEEE Transactions on Intelligent Transportation Systems, 2022.
[PDF]
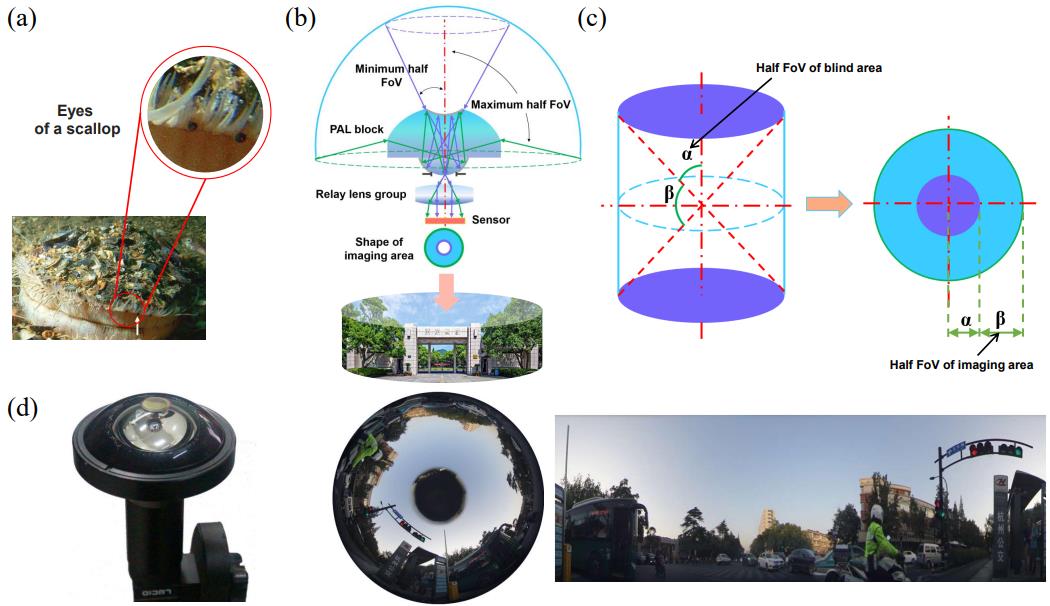
S. Gao, K. Yang, H. Shi, K. Wang, J. Bai.
Review on Panoramic Imaging and Its Applications in Scene
Understanding.
IEEE Transactions on Instrumentation and Measurement, 2022.
[PDF]
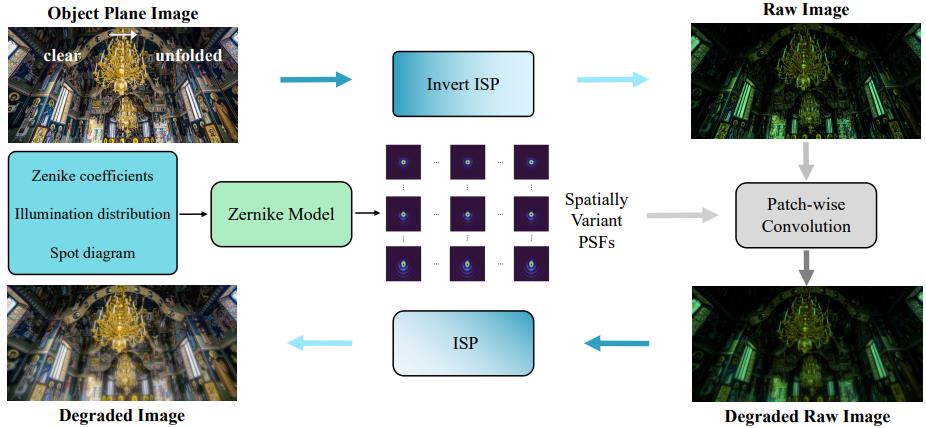
Q. Jiang, H. Shi, L. Sun, S. Gao, K. Yang, K. Wang.
Annular Computational Imaging: Capture Clear Panoramic Images
through Simple Lens.
IEEE Transactions on Computational Imaging, 2022.
[PDF]
[DATA+CODE]

J. Wang, K. Yang, S. Gao, L. Sun, C. Zhu, K. Wang, J. Bai.
High-performance Panoramic Annular Lens Design for Real-time
Semantic Segmentation on Aerial Imagery.
Optical Engineering, 2022.
[PDF]
[DATA]
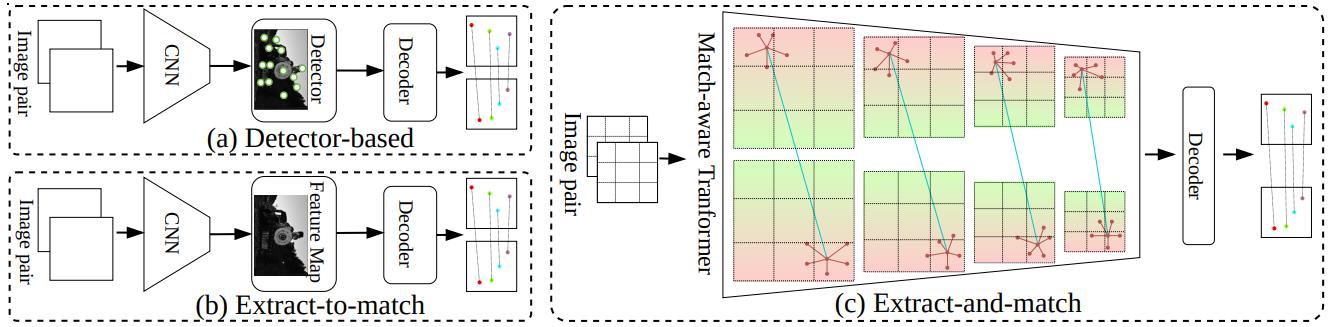
Q. Wang, J. Zhang, K. Yang, K. Peng, R. Stiefelhagen.
MatchFormer: Interleaving Attention in Transformers for Feature
Matching.
In Asian Conference on Computer Vision (ACCV), Macau, China, December 2022.
[PDF]
[CODE]

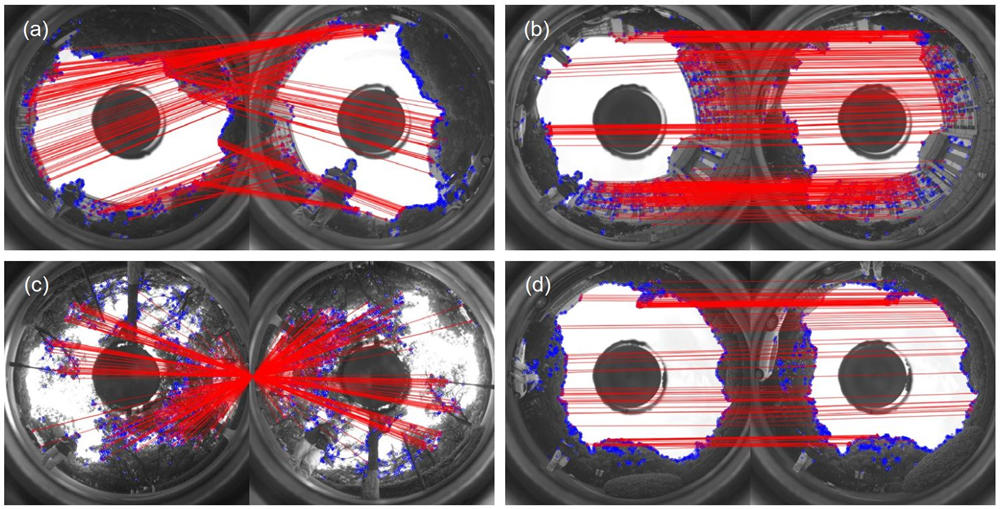
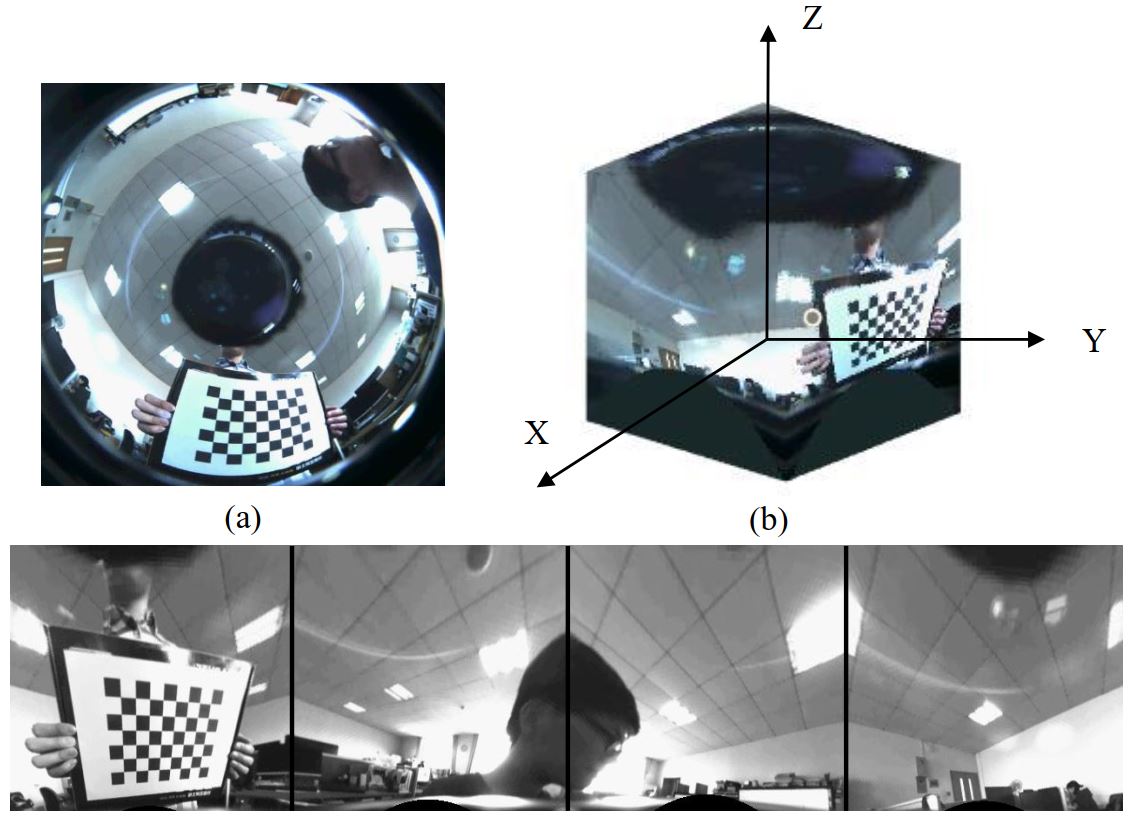
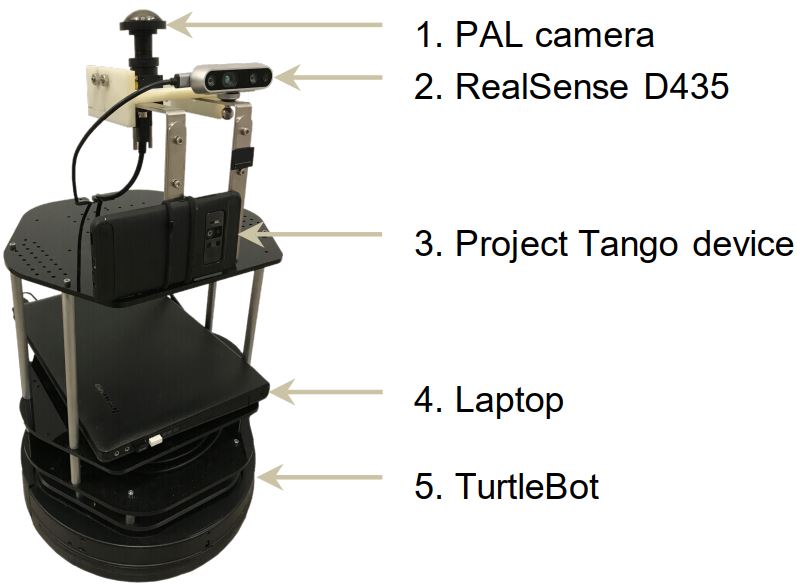
Z. Wang, K. Yang, H. Shi, P. Li, F. Gao, K. Wang.
LF-VIO: A Visual-Inertial-Odometry Framework for Large
Field-of-View Cameras with Negative Plane.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto,
Japan, October 2022.
[PDF]
[VIDEO]
[DATA+CODE]
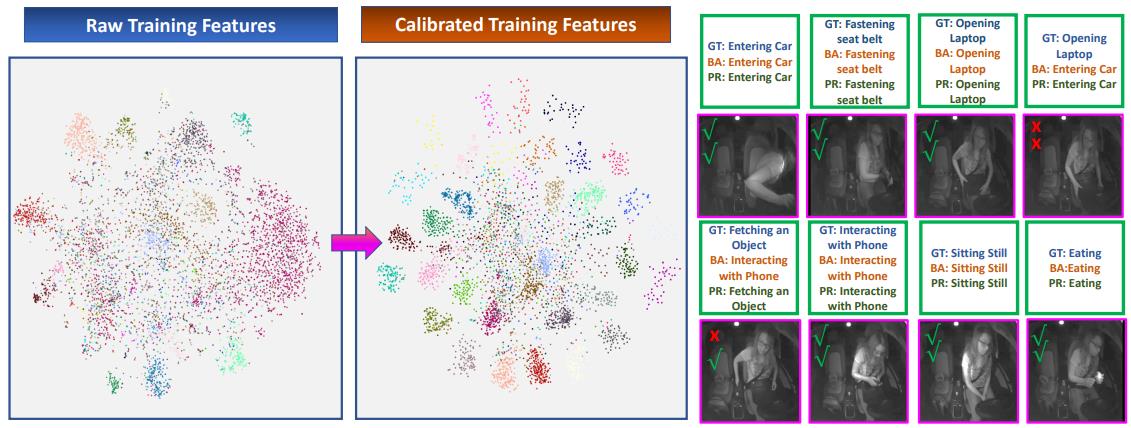
K. Peng, A. Roitberg, K. Yang, J. Zhang, R. Stiefelhagen.
TransDARC: Transformer-based Driver Activity Recognition with
Latent Space Feature Calibration.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto,
Japan, October 2022.
[PDF]
[VIDEO]
[CODE]
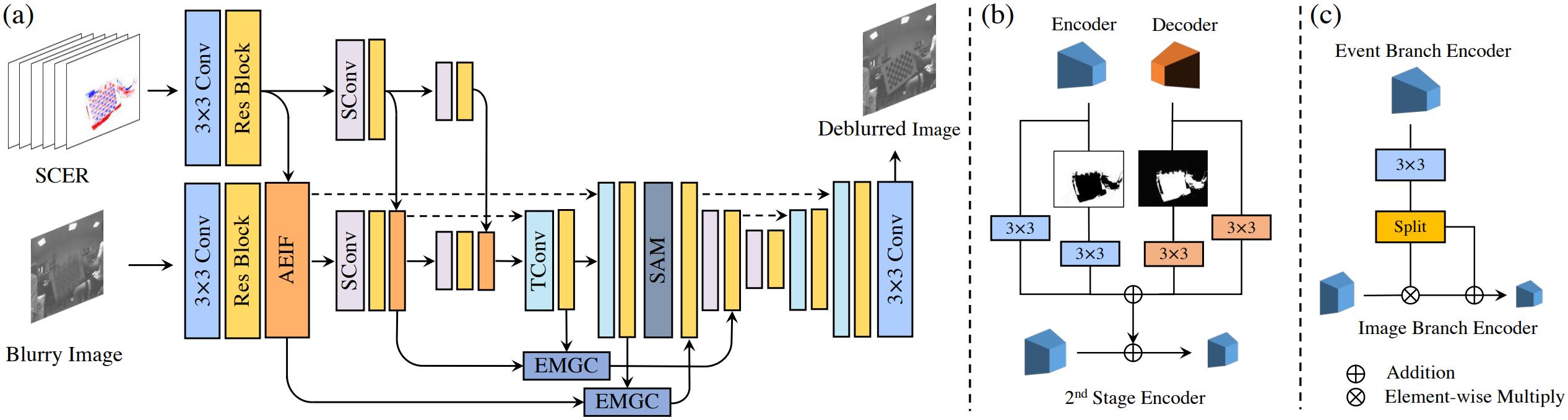
L. Sun, C. Sakardis, J. Liang, Q. Jiang, K. Yang, P. Sun, Y. Ye, K. Wang, L. Van
Gool.
Event-Based Fusion for Motion Deblurring with Cross-modal
Attention.
In European Conference on Computer Vision (ECCV), Tel Aviv, Israel, October 2022.
[Oral]
[PDF]
[DATA+CODE]
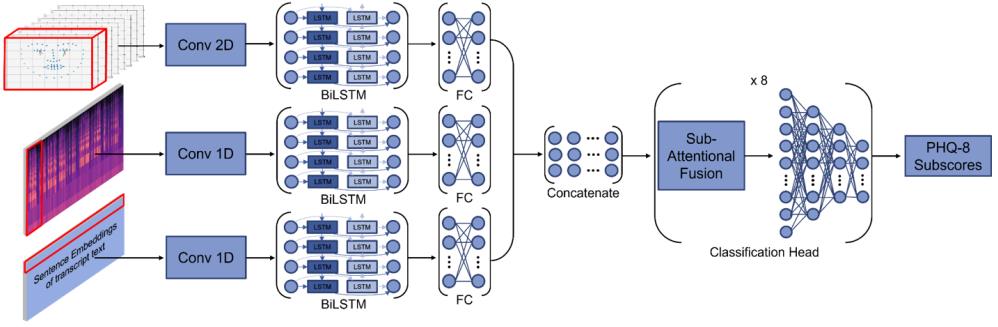
P.-C. Wei, K. Peng, A. Roitberg, K. Yang, J. Zhang, R. Stiefelhagen.
Multi-modal Depression Estimation based on Sub-attentional
Fusion.
In International Workshop on Assistive Computer Vision and Robotics (ACVR) with European
Conference on Computer Vision (ECCV), Tel Aviv, Israel, October 2022.
[PDF]
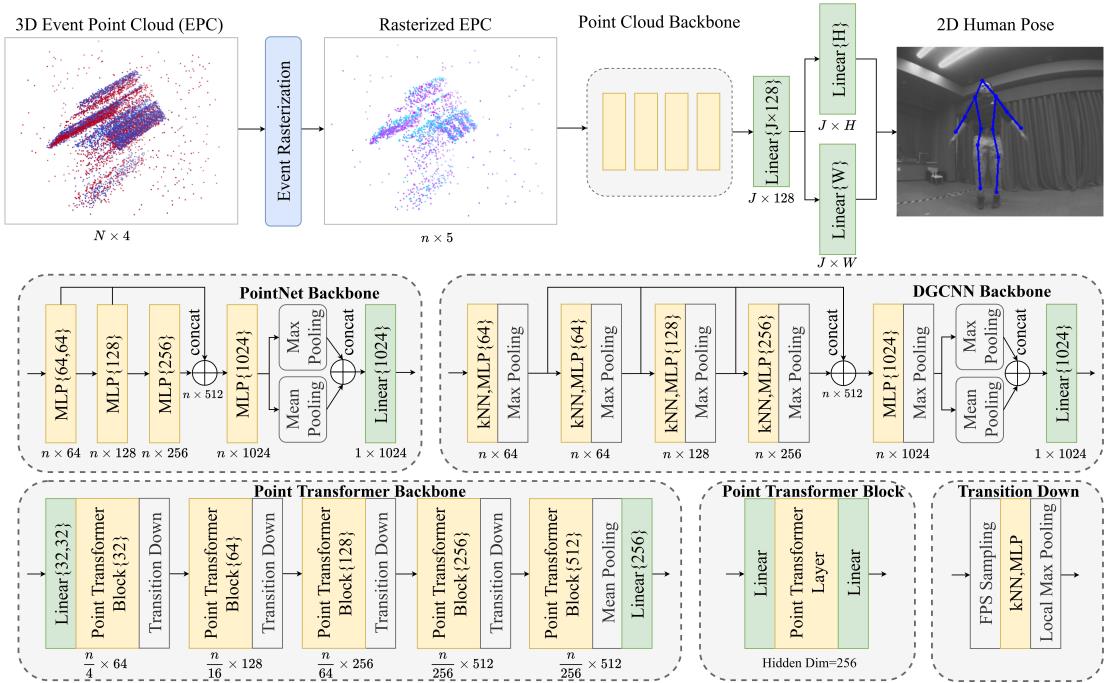
J. Chen, H. Shi, Y. Ye, K. Yang, L. Sun, K. Wang.
Efficient Human Pose Estimation via 3D Event Point Cloud.
In International Conference on 3D Vision (3DV), Prague, Czechia, September 2022.
[PDF]
[VIDEO]
[CODE]
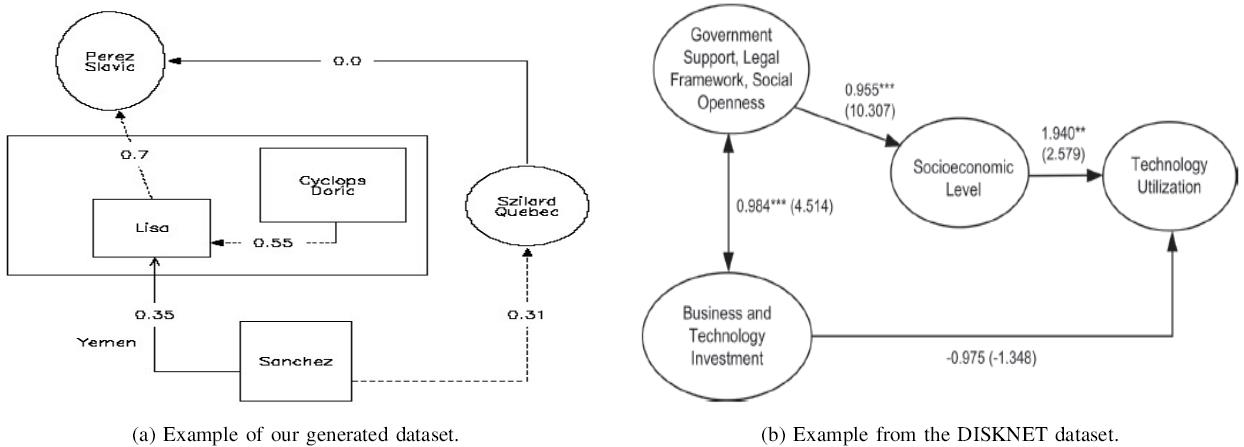
L. Schölch, J. Steinhäuser, M. Beichter, C. Seibold, K. Yang, M. Knaeble, T. Schwarz, A.
Maedche, R. Stiefelhagen.
Towards Automatic Parsing of Structured Visual Content through the
Use of Synthetic Data.
In International Conference on Pattern Recognition (ICPR), Montreal, QC, Canada, August 2022.
[PDF]
[DATA]

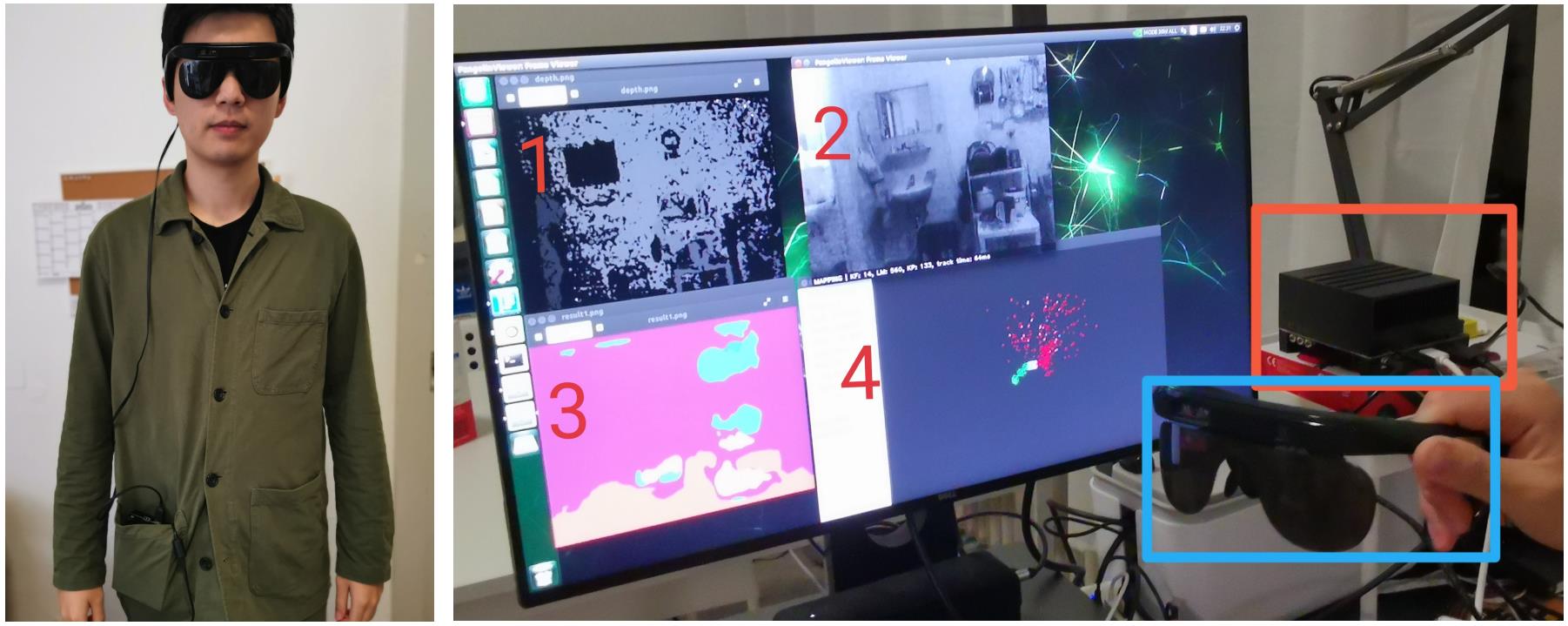
W. Ou, J. Zhang, K. Peng, K. Yang, G. Jaworek, K. Müller, R. Stiefelhagen.
Indoor Navigation Assistance for Visually Impaired People via Dynamic SLAM and Panoptic Segmentation with an RGB-D Sensor.
In Joint International Conference on Digital Inclusion, Assistive Technology & Accessibility
(ICCHP-AAATE), Lecco, Italy, July 2022.
[PDF]
[VIDEO]
M. Knaeble, Z. Chen, T. Schwarz, G. Sailer, K. Yang, R. Stiefelhagen, A. Maedche.
Accessible Chemical Structural Formulas through Interactive
Document Labeling.
In Joint International Conference on Digital Inclusion, Assistive Technology & Accessibility
(ICCHP-AAATE), Lecco, Italy, July 2022.
[PDF]
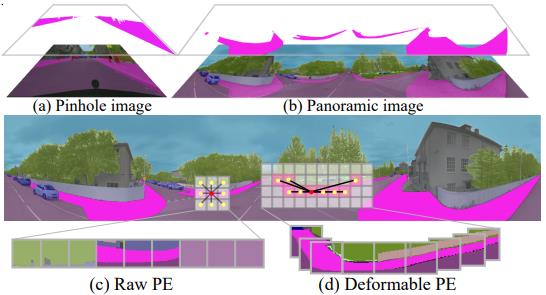
J. Zhang, K. Yang, C. Ma, S. Reiß, K. Peng, R. Stiefelhagen.
Bending Reality: Distortion-aware Transformers for Adapting to
Panoramic Semantic Segmentation.
In IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans,
LA, United States, June 2022.
[PDF]
[CODE]
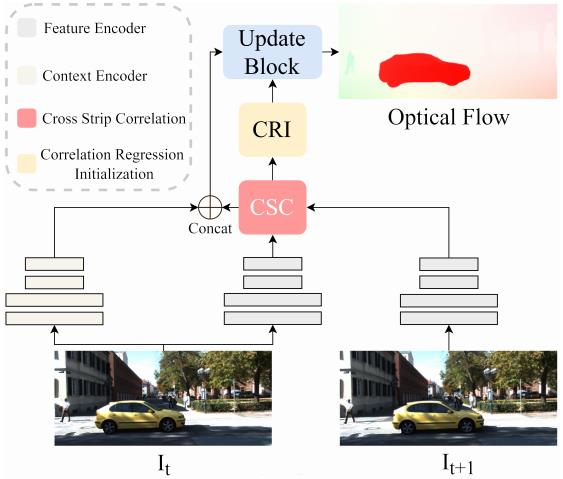
H. Shi, Y. Zhou, K. Yang, X. Yin, K. Wang.
CSFlow: Learning Optical Flow via Cross Strip Correlation for
Autonomous Driving.
In IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, June 2022.
[Oral]
[PDF]
[CODE]
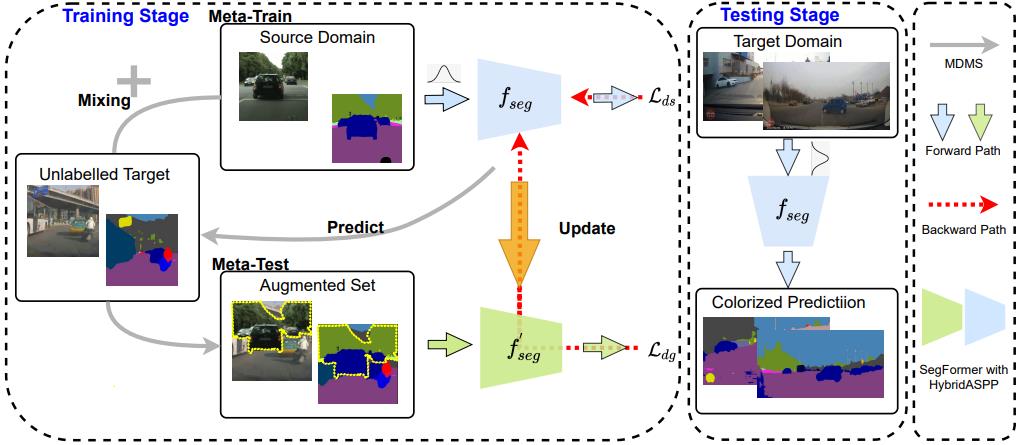
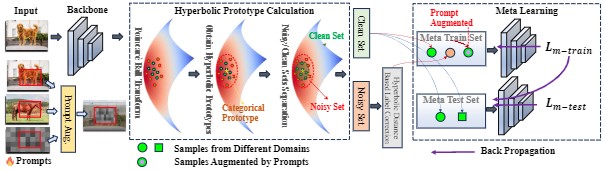
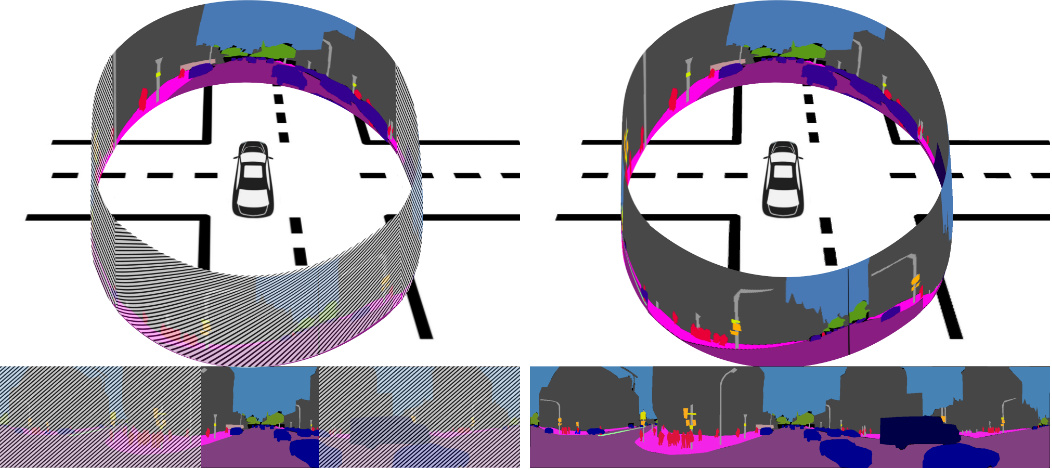
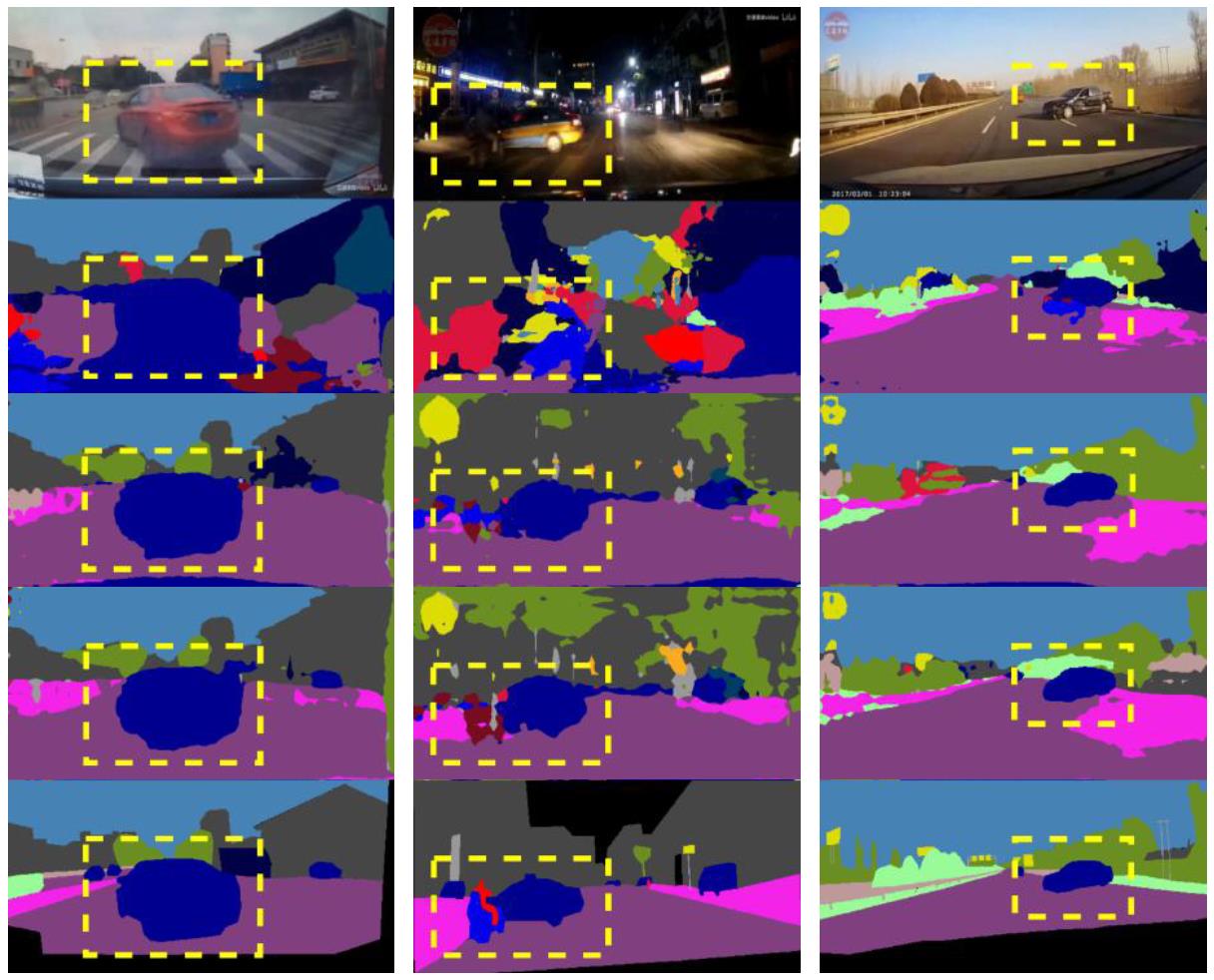
X. Luo, J. Zhang, K. Yang, A. Roitberg, K. Peng, R. Stiefelhagen.
Towards Robust Semantic Segmentation of Accident Scenes via
Multi-Source Mixed Sampling and Meta-Learning.
In Workshop on Autonomous Driving (WAD) with IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), New Orleans, LA, United States, June 2022.
[PDF]
[CODE]
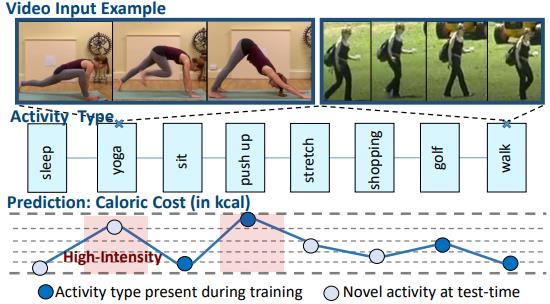
K. Peng, A. Roitberg, K. Yang, J. Zhang, R. Stiefelhagen.
Should I take a walk? Estimating Energy Expenditure from Video
Data.
In International Workshop on Computer Vision for Physiological Measurement (CVPM) with
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA,
United States, June 2022.
[PDF]
[DATA+CODE]
2021 折叠
J. Zhang, C. Ma, K. Yang, A. Roitberg, K. Peng, R. Stiefelhagen.
Transfer
beyond the Field of View: Dense Panoramic Semantic Segmentation via Unsupervised Domain
Adaptation.
IEEE Transactions on Intelligent Transportation Systems, 2021.
[PDF]
[DATA+CODE]
J. Zhang, K. Yang, R. Stiefelhagen.
Exploring
Event-driven Dynamic Context for Accident Scene Segmentation.
IEEE Transactions on Intelligent Transportation Systems, 2021.
[PDF]
[DATA+CODE]

K. Yang, X. Hu, R. Stiefelhagen.
Is
Context-Aware CNN Ready for the Surroundings? Panoramic Semantic Segmentation in the
Wild.
IEEE Transactions on Image Processing, 2021.
[PDF]
[DATA]
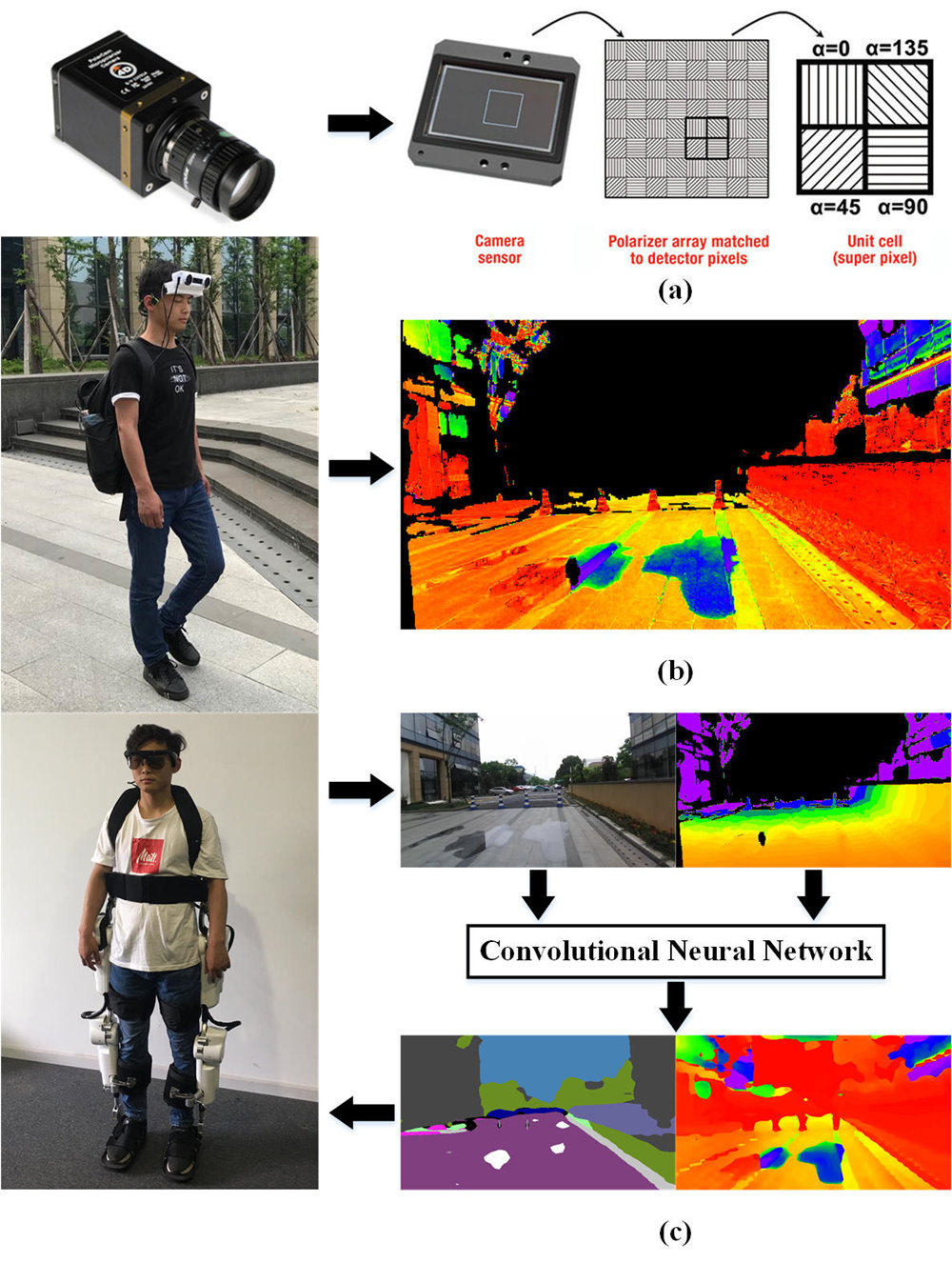
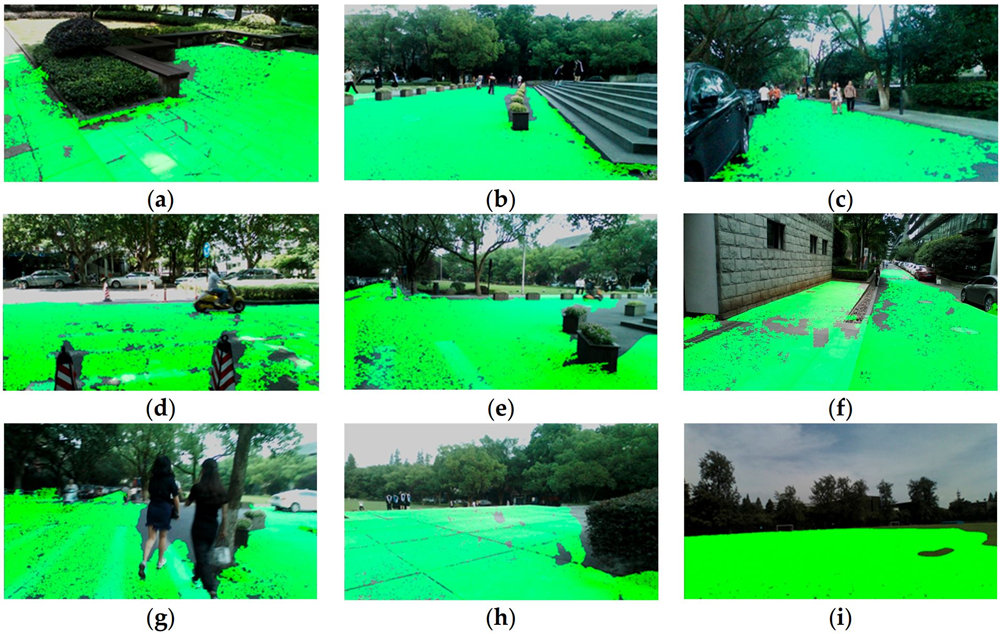
K. Xiang, K. Yang, K. Wang.
Polarization-driven
Semantic Segmentation via Efficient Attention-bridged Fusion.
Optics Express, 2021.
[PDF]
[DATA]
[CODE]
H. Chen, W. Hu, K. Yang, J. Bai, K. Wang.
Panoramic
annular
SLAM with loop closure and global optimization.
Applied Optics, 2021.
[PDF]
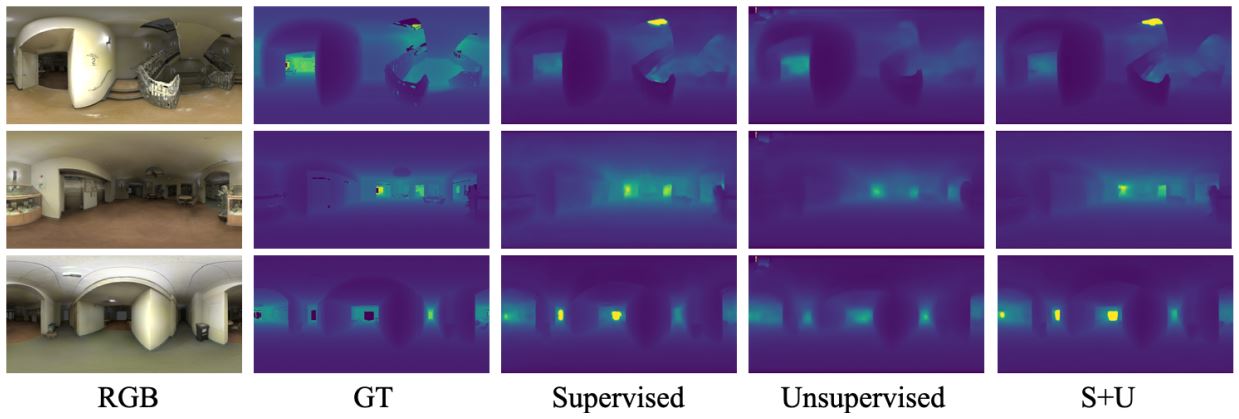
K. Zhou, K. Yang, K. Wang.
Panoramic
Depth
Estimation via Supervised and Unsupervised Learning in Indoor Scenes.
Applied Optics, 2021.
[PDF]
[CODE]
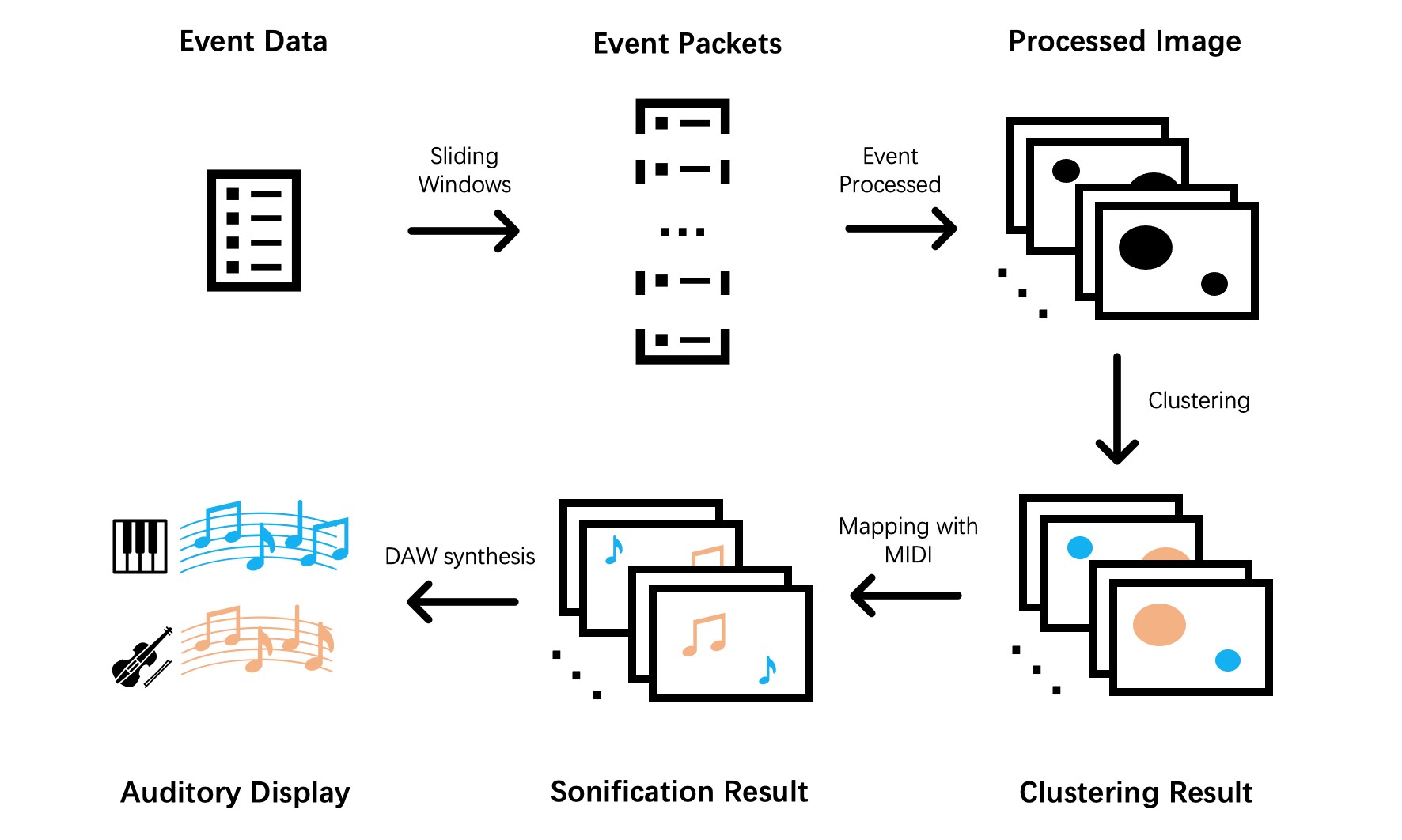
Z. Ji, W. Hu, Z. Wang, K. Yang, K. Wang.
Seeing
through
Events: Real-Time Moving Object Sonification for Visually Impaired People using
Event-Based
Camera.
Sensors, 2021.
[PDF]
[VIDEO]
[CODE]
H. Chen, K. Yang, W. Hu, J. Bai, K. Wang.
Semantic
Visual Odometry based on Panoramic Annular Imaging.
Acta Optica Sinica, 2021.
[PDF]
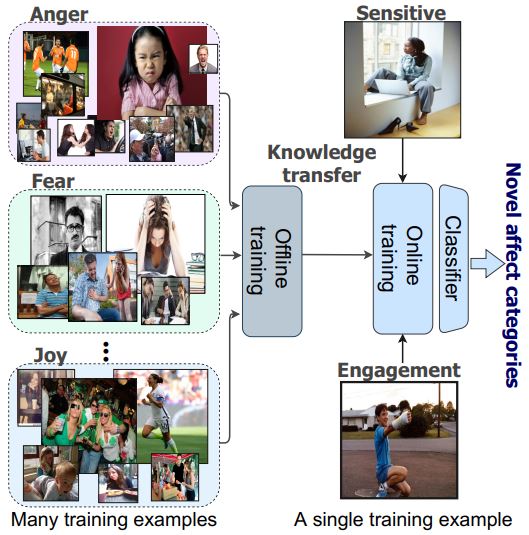
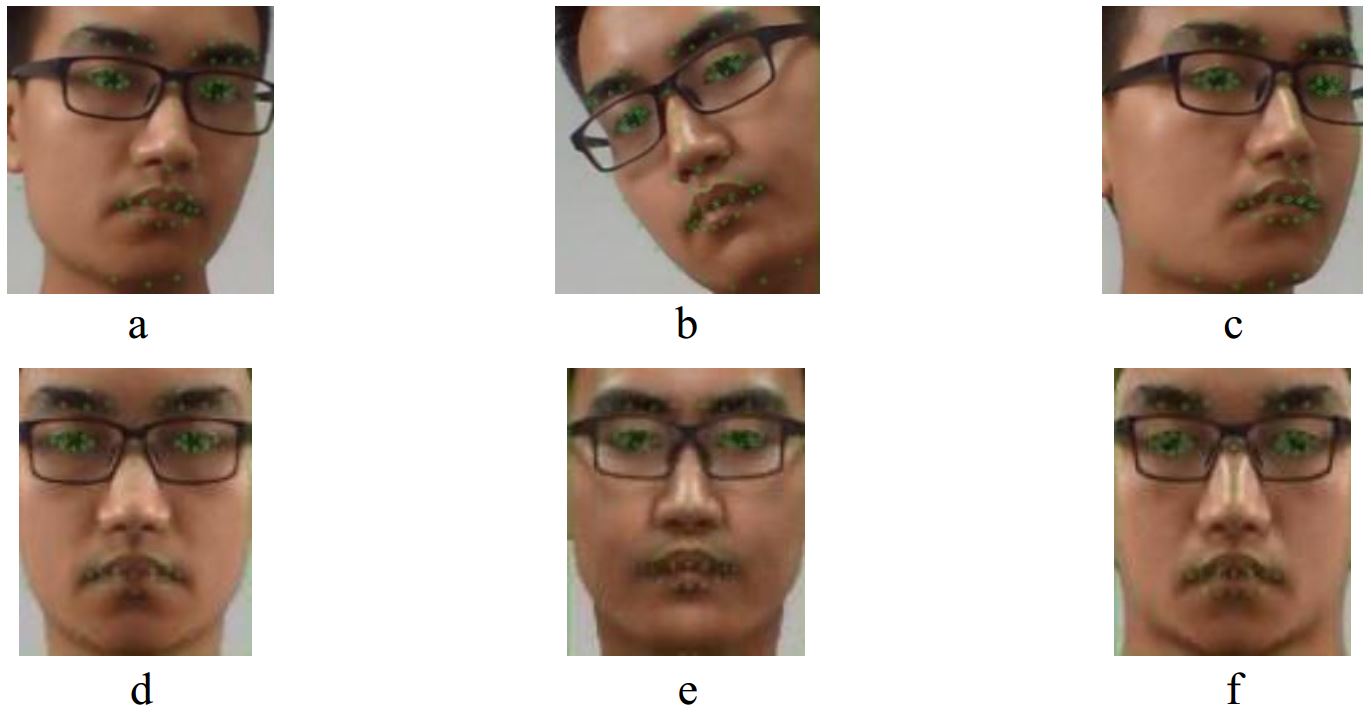
K. Peng, A. Roitberg, D. Schneider, M. Koulakis, K. Yang, R. Stiefelhagen.
Affect-DML:
Context-Aware One-Shot Recognition of Human Affect using Deep Metric Learning.
In IEEE International Conference on Automatic Face and Gesture Recognition (FG),
Jodhpur,
India (Virtual), December 2021.
[PDF]
[CODE]
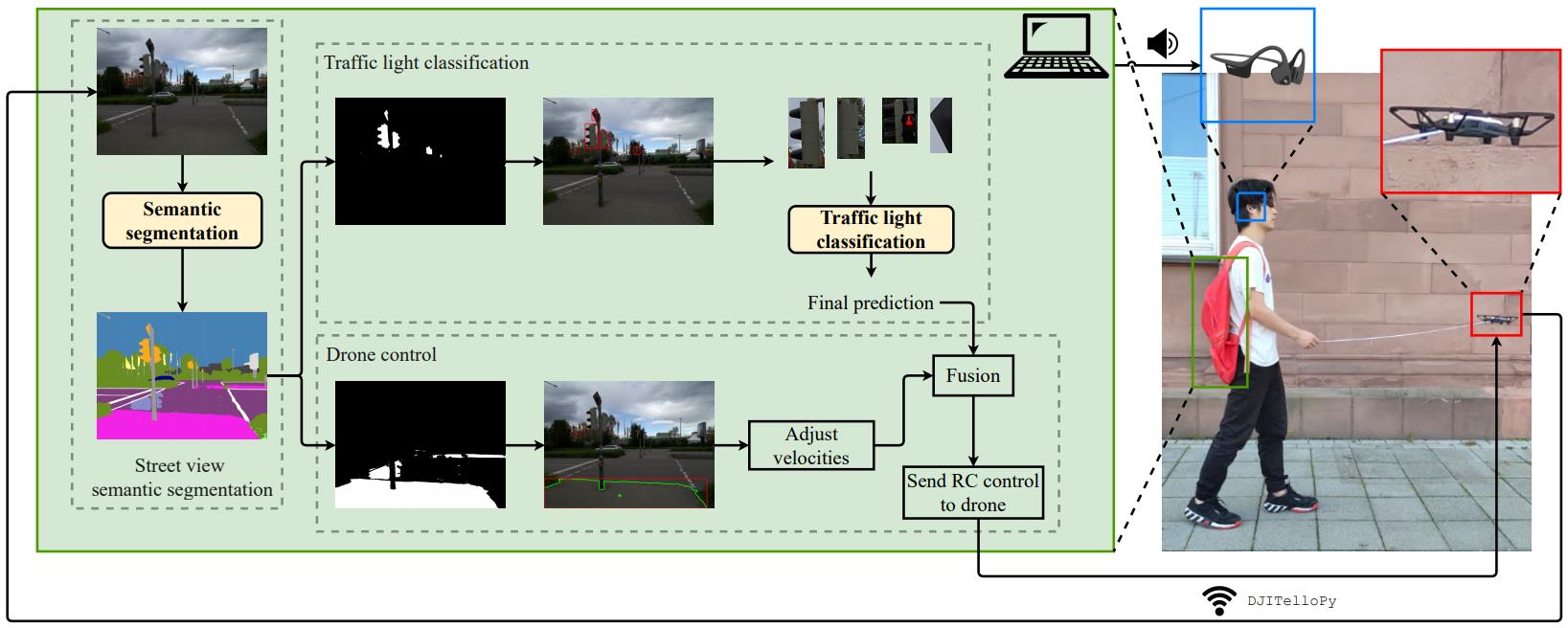
H. Tan, C. Chen, X. Luo, J. Zhang, C. Seibold, K. Yang, R. Stiefelhagen.
Flying
Guide
Dog: Walkable Path Discovery for the Visually Impaired Utilizing Drones and
Transformer-based Semantic Segmentation.
In IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China,
December 2021.
[PDF]
[VIDEO]
[DATA+CODE]
R. Yan, K. Yang, K. Wang.
NLFNet:
Non-Local Fusion Towards Generalized Multimodal Semantic Segmentation across RGB-Depth,
Polarization, and Thermal Images.
In IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China,
December 2021.
[PDF]
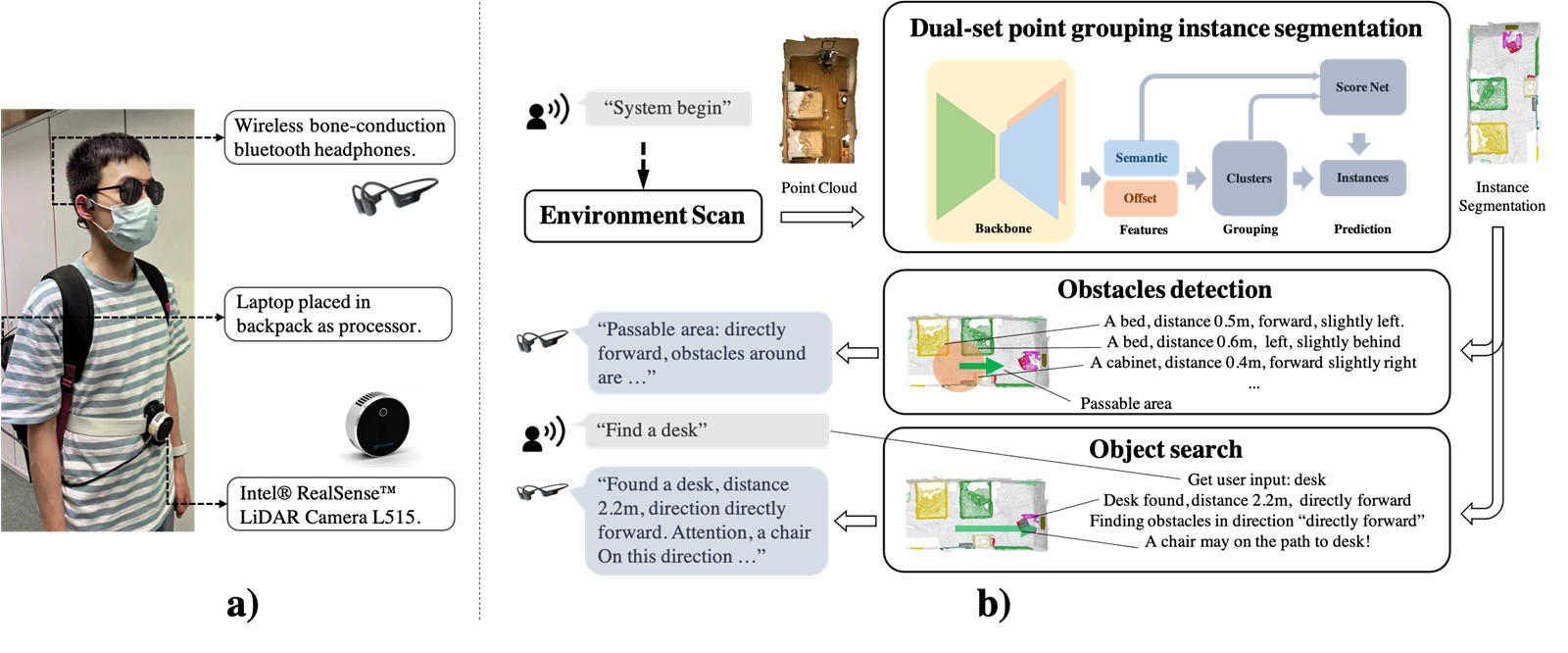
H. Liu, R. Liu, K. Yang, J. Zhang, K. Peng, R. Stiefelhagen.
HIDA:
Towards Holistic Indoor Understanding for the Visually Impaired via Semantic Instance Segmentation with a Wearable Solid-State LiDAR Sensor.
In International Workshop on Assistive Computer Vision and Robotics (ACVR) with IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada (Virtual), October 2021.
[PDF]
[VIDEO]
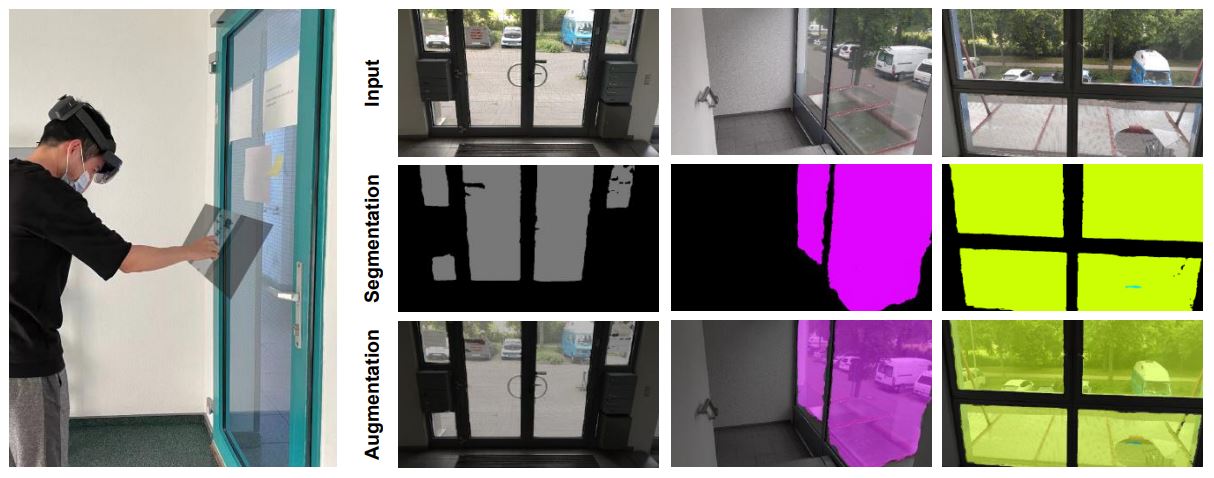
J. Zhang, K. Yang, A. Constantinescu, K. Peng, K. Müller, R. Stiefelhagen.
Trans4Trans:
Efficient Transformer for Transparent Object Segmentation to Help Visually Impaired People Navigate in the Real World.
In International Workshop on Assistive Computer Vision and Robotics (ACVR) with IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada (Virtual), October 2021.
[PDF]
[CODE]
[UNITE.AI]
[The
Good AI]

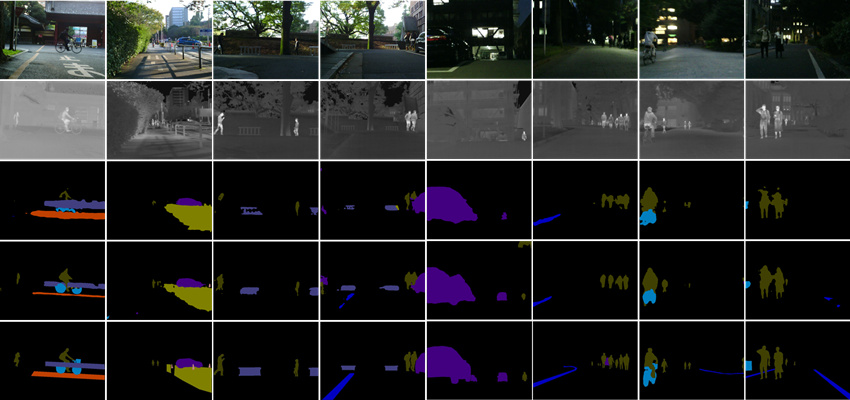
J. Zhang, K. Yang, R. Stiefelhagen.
ISSAFE:
Improving Semantic Segmentation in Accidents by Fusing Event-based Data.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
Prague,
Czech Republic (Virtual), September 2021.
[PDF]
[VIDEO]
[DATA+CODE]
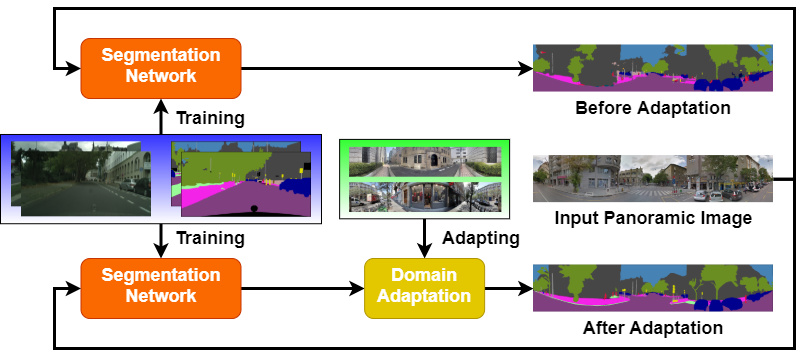
C. Ma, J. Zhang, K. Yang, A. Roitberg, R. Stiefelhagen.
DensePASS:
Dense Panoramic Semantic Segmentation via Unsupervised Domain Adaptation with
Attention-Augmented Context Exchange.
In IEEE International Conference on Intelligent Transportation Systems (ITSC),
Indianapolis, IN, United States (Virtual), September 2021.
[PDF]
[DATA+CODE]

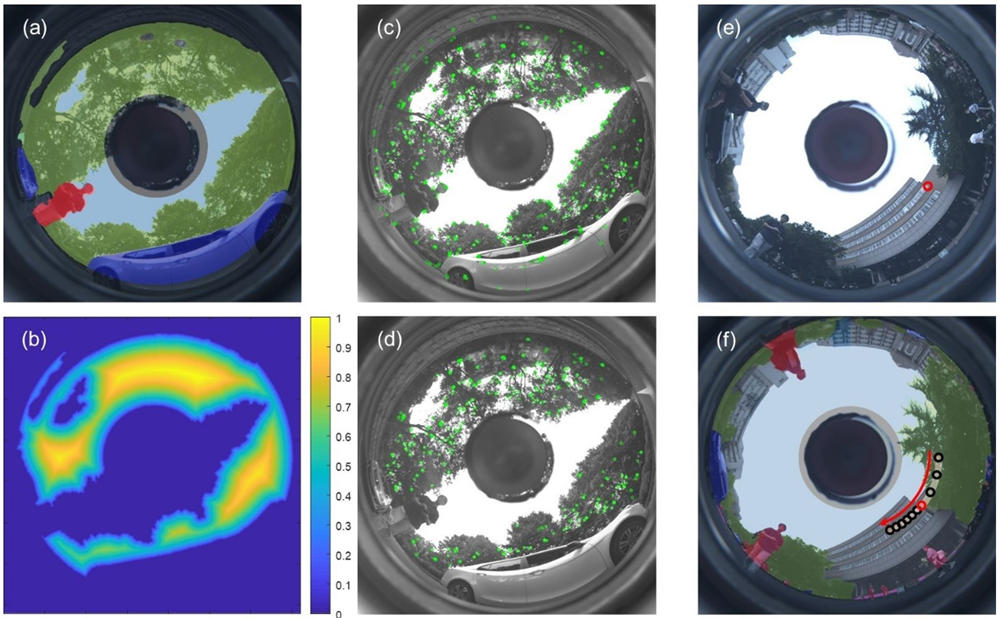
L. Sun, J. Wang, K. Yang, K. Wu, X. Zhou, K. Wang, J. Bai.
Aerial-PASS:
Panoramic Annular Scene Segmentation in Drone Videos.
In European Conference on Mobile Robots (ECMR), Bonn, Germany (Virtual), August 2021.
[PDF]
[VIDEO]
[DATA]
A. Jaus, K. Yang, R. Stiefelhagen.
Panoramic
Panoptic Segmentation: Towards Complete Surrounding Understanding via Unsupervised
Contrastive Learning.
In IEEE Intelligent Vehicles Symposium (IV), Nagoya, Japan (Virtual), July 2021.
[Best Paper Award]
[PDF]
[DATA+CODE]
![[Best Paper Award]](https://cvhci.anthropomatik.kit.edu/img/IV2021-1%20Kopie_rdax_1024x572_98.png){kind=link}
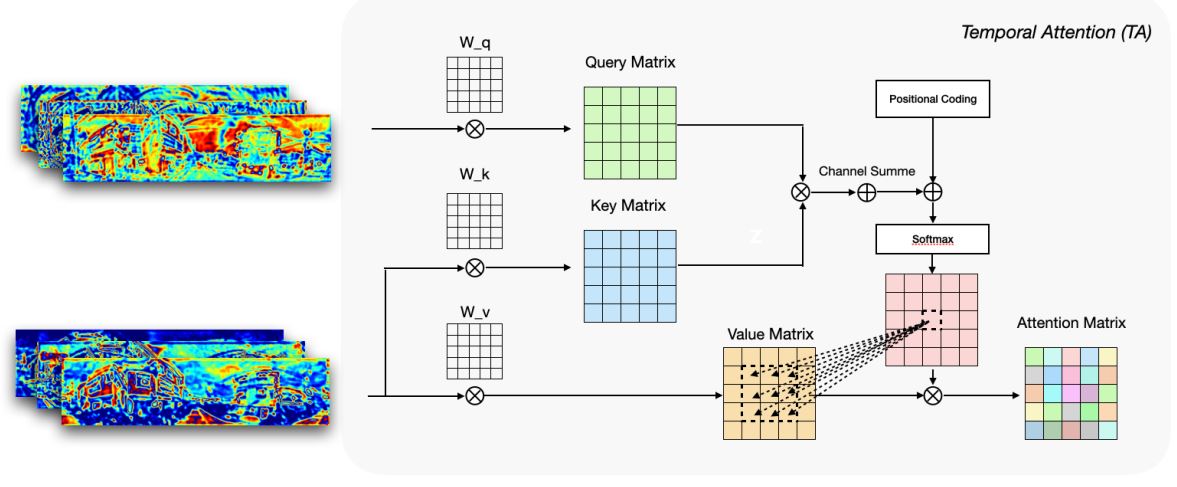
S. Chen, K. Yang, R. Stiefelhagen.
DR-TANet:
Dynamic Receptive Temporal Attention Network for Street Scene Change
Detection.
In IEEE Intelligent Vehicles Symposium (IV), Nagoya, Japan (Virtual), July 2021.
[PDF]
[CODE]
W. Mao, J. Zhang, K. Yang, R. Stiefelhagen.
Panoptic
Lintention Network: Towards Efficient Navigational Perception for the Visually
Impaired.
In IEEE International Conference on Real-time Computing and Robotics (RCAR), Xining,
China, July 2021.
[PDF]
[VIDEO]
[CODE]

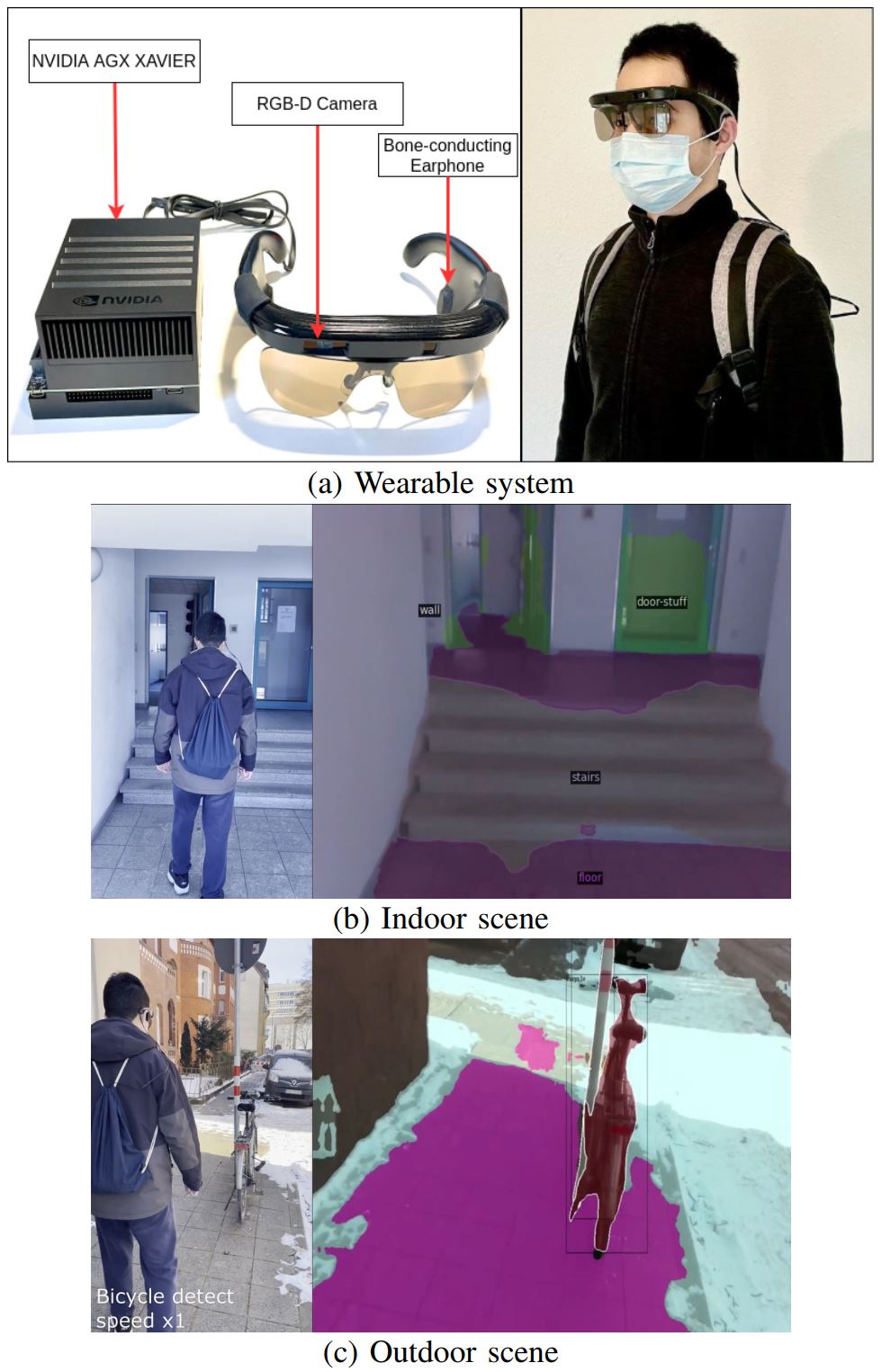
Y. Zhang, H. Chen, K. Yang, J. Zhang, R. Stiefelhagen.
Perception
Framework through Real-Time Semantic Segmentation and Scene Recognition on a Wearable
System
for the Visually Impaired.
In IEEE International Conference on Real-time Computing and Robotics (RCAR), Xining,
China, July 2021.
[PDF]
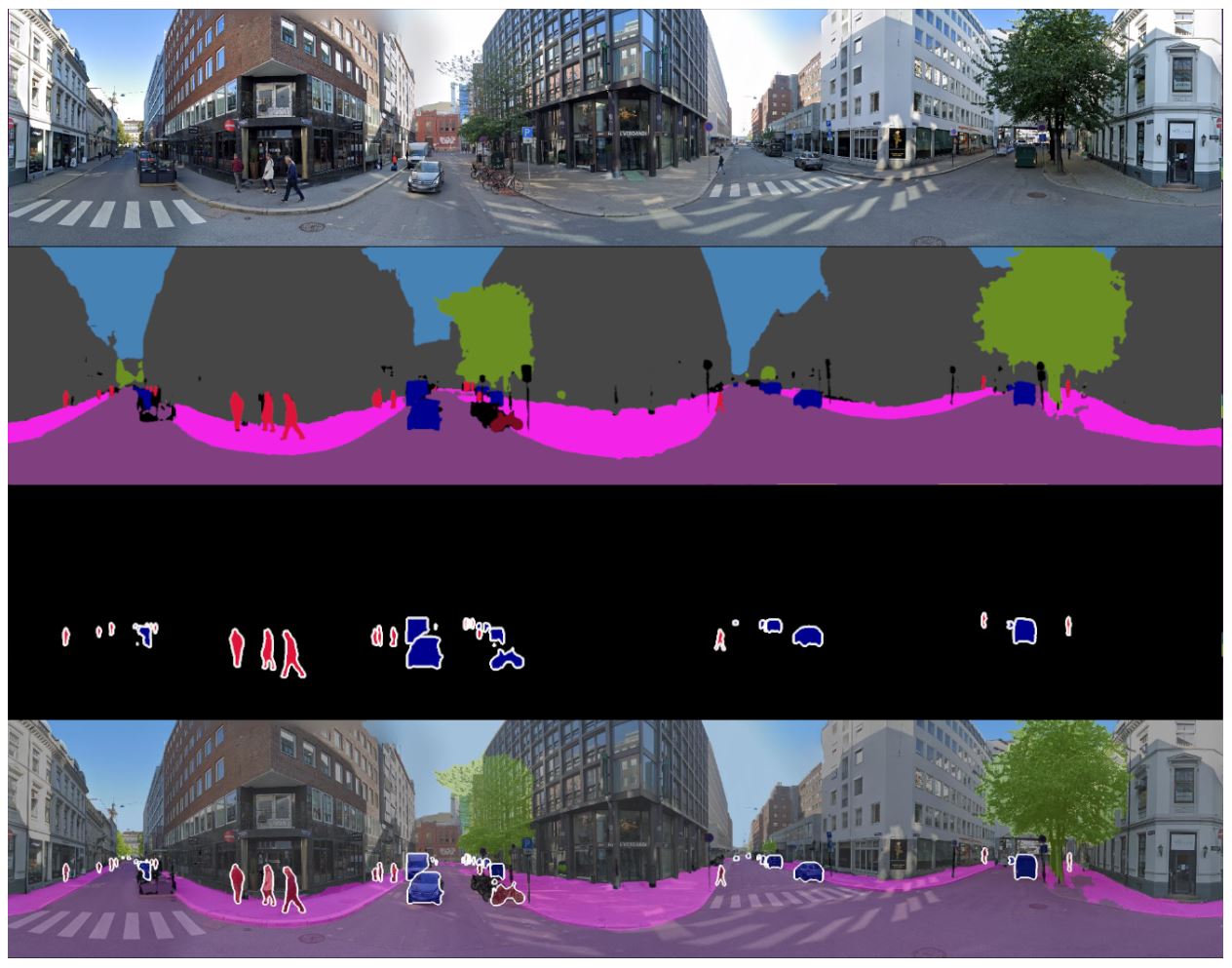
K. Yang, J. Zhang, S. Reiß, X. Hu, R. Stiefelhagen.
Capturing
Omni-Range Context for Omnidirectional Segmentation.
In IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville,
TN,
United States (Virtual), June 2021.
[PDF]
[DATA+CODE]
[Zhihu]
[WeChat]
2020 折叠
K. Yang, X. Hu, Y. Fang, K. Wang, R. Stiefelhagen.
Omnisupervised Omnidirectional Semantic Segmentation.
IEEE Transactions on Intelligent Transportation Systems, 2020.
[PDF]
[DATA+CODE]
L. Sun, K. Yang, X. Hu, W. Hu, K. Wang.
Real-time Fusion Network for RGB-D Semantic Segmentation Incorporating Unexpected Obstacle Detection for Road-driving Images.
IEEE Robotics and Automation Letters with IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, United States (Virtual), October 2020.
[PDF]
[CODE]

M. Martinez, K. Yang, A. Constantinescu, R. Stiefelhagen.
Helping the Blind to Get through COVID-19: Social Distancing Assistant Using Real-Time Semantic Segmentation on RGB-D Video.
Sensors, 2020.
[Highlighted as an Editors' Pick]
[PDF]
[DATA+CODE]
W. Hu, K. Wang, K. Yang, R. Cheng, Y. Ye, L. Sun, Z. Xu.
A Comparative Study in Real-Time Scene Sonification for Visually Impaired People.
Sensors, 2020.
[PDF]
Y. Fang, K. Yang, R. Cheng, L. Sun, K. Wang.
A Panoramic Localizer Based on Coarse-to-Fine Descriptors for Navigation Assistance.
Sensors, 2020.
[PDF]
[DATA]
W. Mao, J. Zhang, K. Yang, R. Stiefelhagen.
Can we cover navigational perception needs of the visually impaired by panoptic segmentation?
In CoRR, 2020.
[PDF]
[CODE]
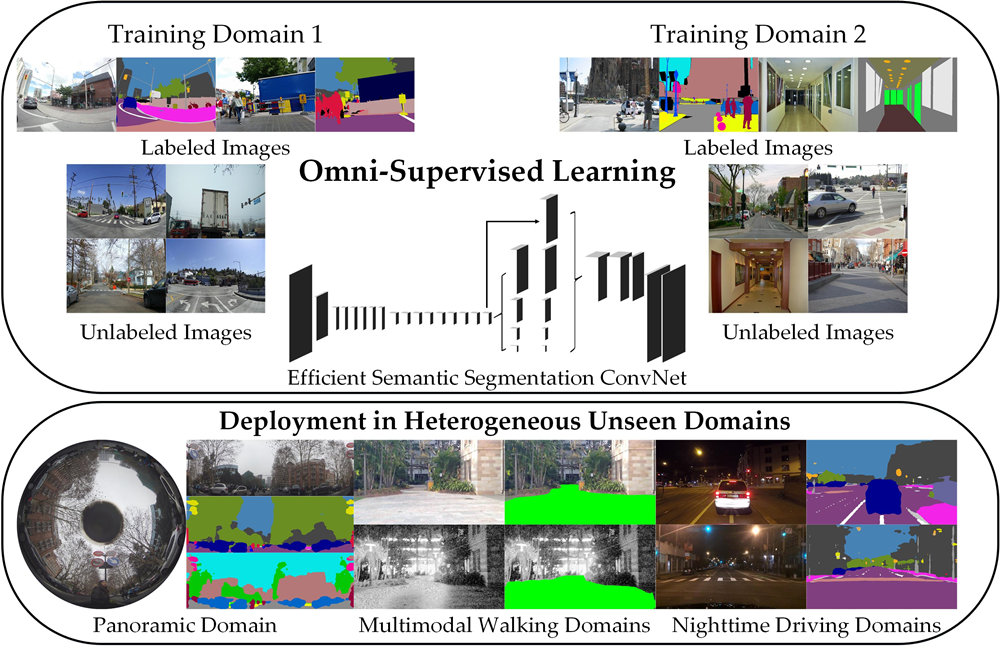
K. Yang, X. Hu, K. Wang, R. Stiefelhagen.
In Defense of Multi-Source Omni-Supervised Efficient ConvNet for Robust Semantic Segmentation in Heterogeneous Unseen Domains.
In IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, United States (Virtual), October 2020.
[PDF]
[DATA+CODE]
K. Yang, X. Hu, H. Chen, K. Xiang, K. Wang, R. Stiefelhagen.
DS-PASS: Detail-Sensitive Panoramic Annular Semantic Segmentation through SwaftNet for Surrounding Sensing.
In IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, United States (Virtual), October 2020.
[PDF]
[VIDEO]
[DATA+CODE]

Y. Fang, K. Wang, R. Cheng, K. Yang.
CFVL: A Coarse-to-Fine Vehicle Localizer with Omnidirectional Perception across Severe Appearance Variations.
In IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, United States (Virtual), October 2020.
[PDF]
[DATA]
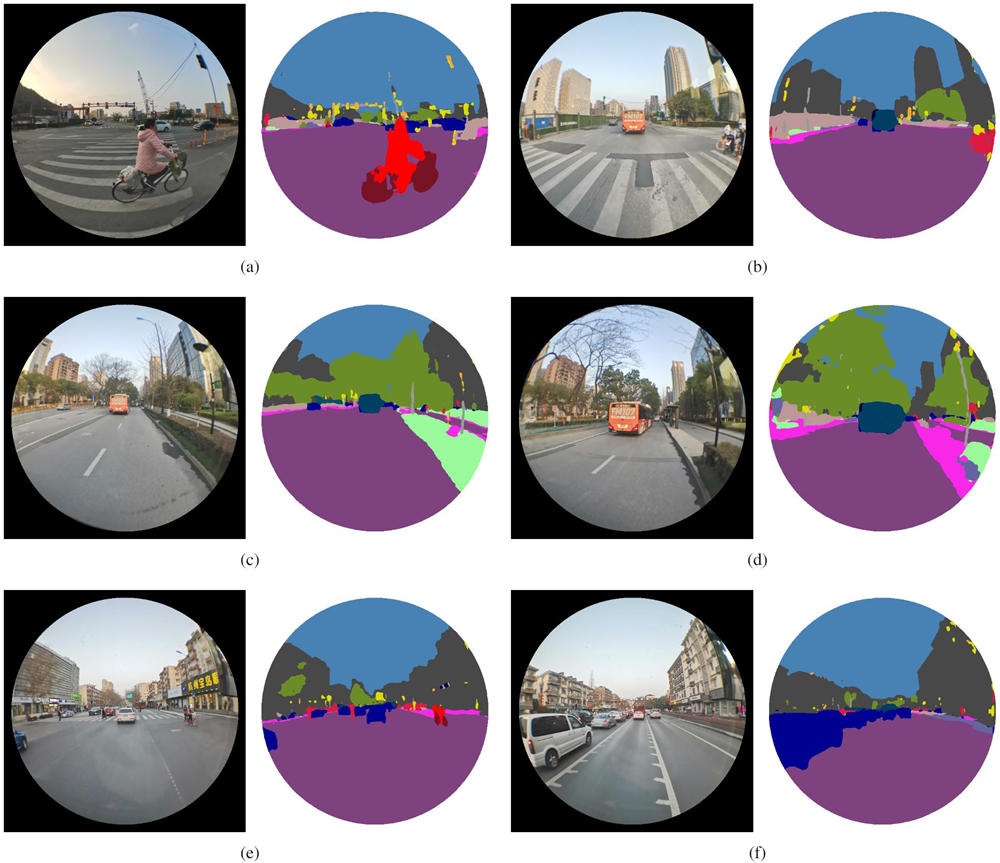
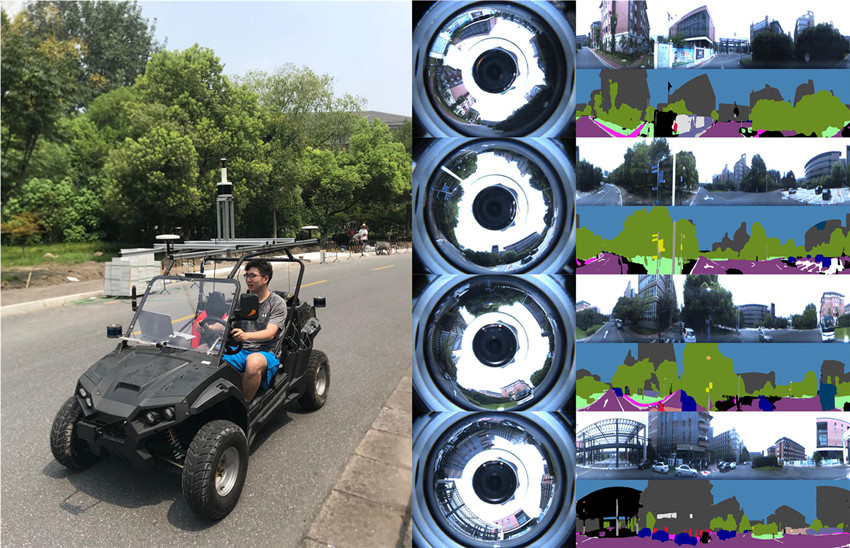
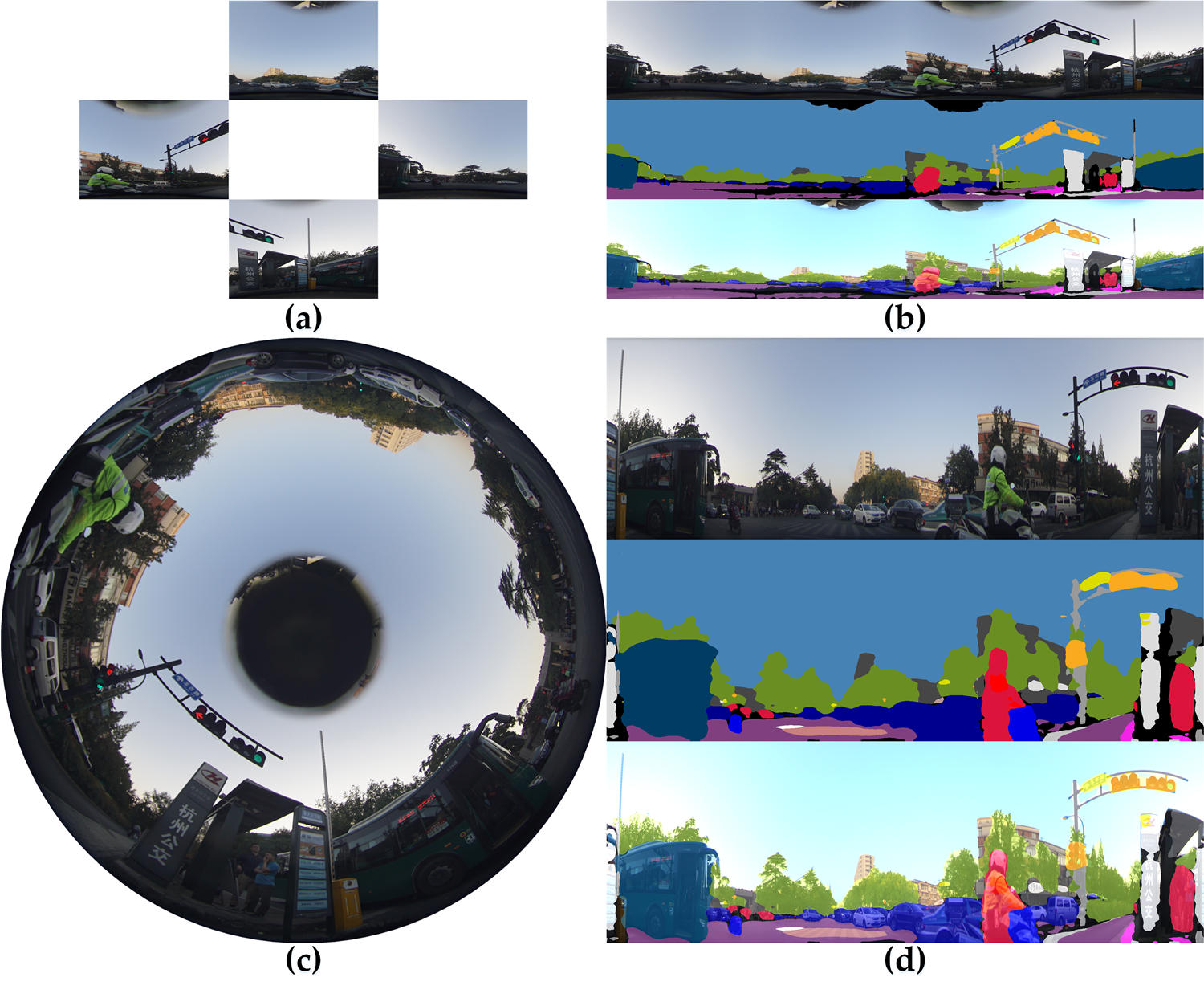
Y. Ye, K. Yang, K. Xiang, J. Wang, K. Wang.
Universal Semantic Segmentation for Fisheye Urban Driving Images.
In IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, QC, Canada (Virtual), October 2020.
[PDF]
[CODE]
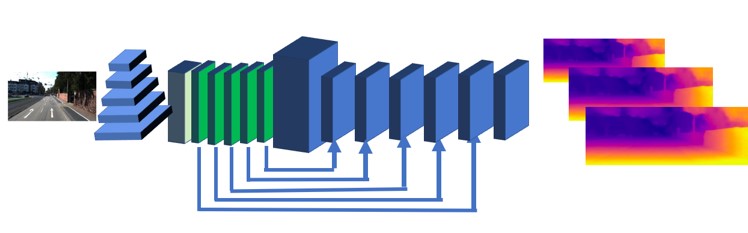
K. Zhou, K. Wang, K. Yang.
PADENet: An Efficient and Robust Panoramic Monocular Depth Estimation Network for Outdoor Scenes.
In IEEE Intelligent Transportation Systems Conference (ITSC), Rhodes, Greece (Virtual), September 2020.
[PDF]
[CODE]
H. Chen, Y. Zhang, K. Yang, M. Martinez, K. Müller, R. Stiefelhagen.
Can We Unify Perception and Localization in Assisted Navigation? An Indoor Semantic Visual Positioning System for Visually Impaired People.
In International Conference on Computers Helping People with Special Needs (ICCHP), Lecco, Italy (Virtual), September 2020.
[PDF]
[CODE]
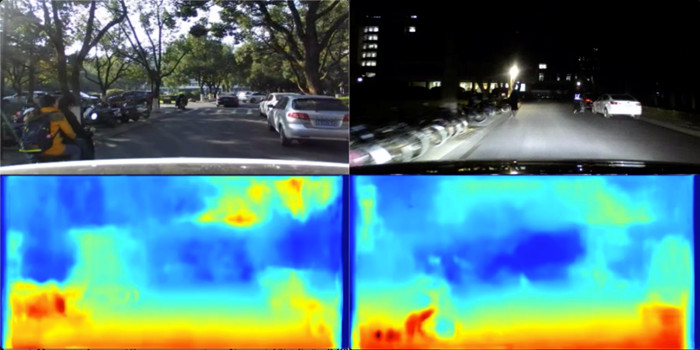
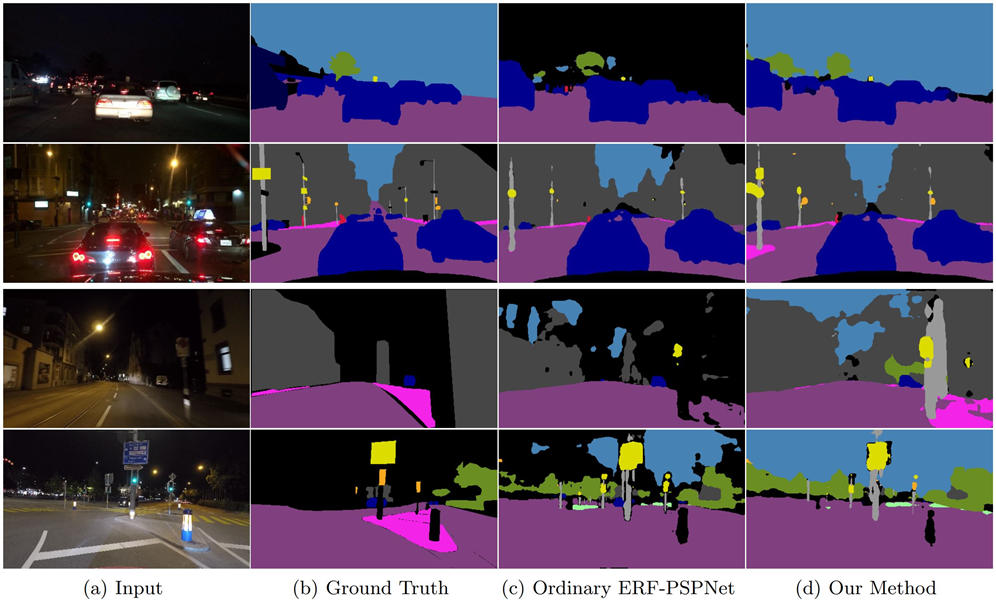
K. Zhou, K. Wang, K. Yang.
A Robust Monocular Depth Estimation Framework Based on Light-Weight ERF-PSPNet for Day-Night Driving Scenes.
In International Conference on Graphics, Images and Interactive Techniques (CGIIT), Sanya, China (Virtual), February 2020.
[PDF]
[DATA]
2019 折叠
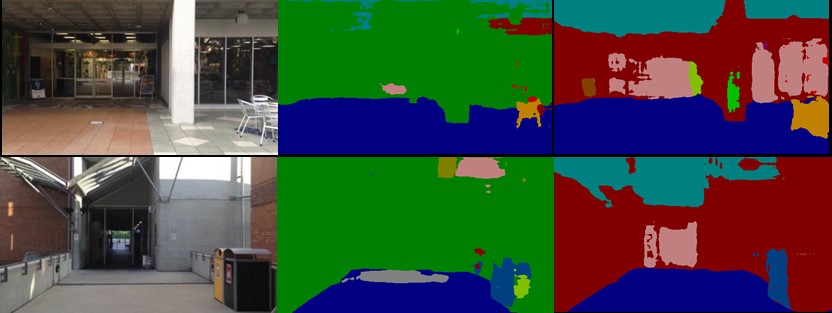
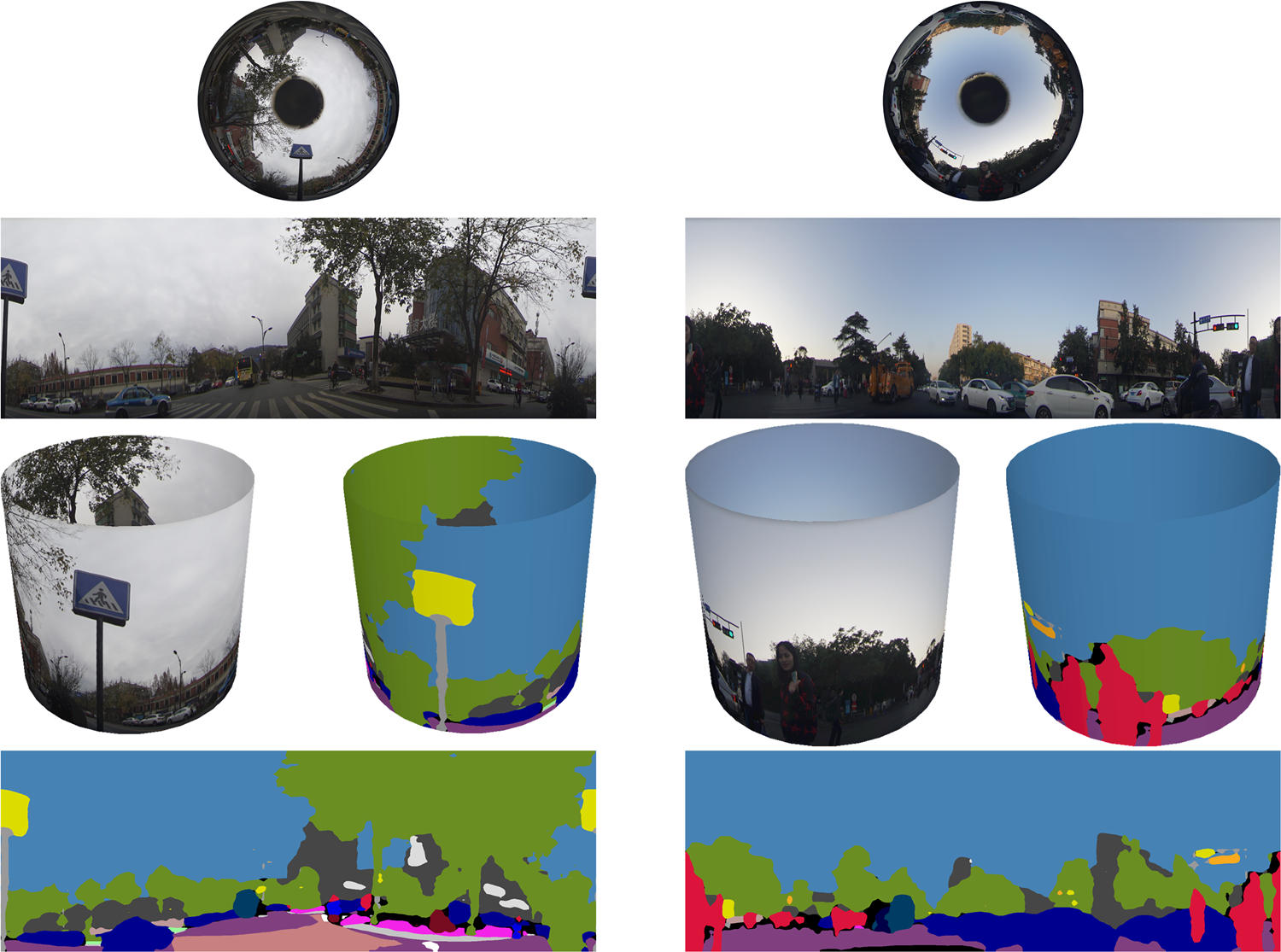
K. Yang, X. Hu, L.M. Bergasa, E. Romera, K. Wang.
PASS:
Panoramic Annular Semantic Segmentation.
IEEE Transactions on Intelligent Transportation Systems, 2019.
[PDF]
[DATA+CODE]
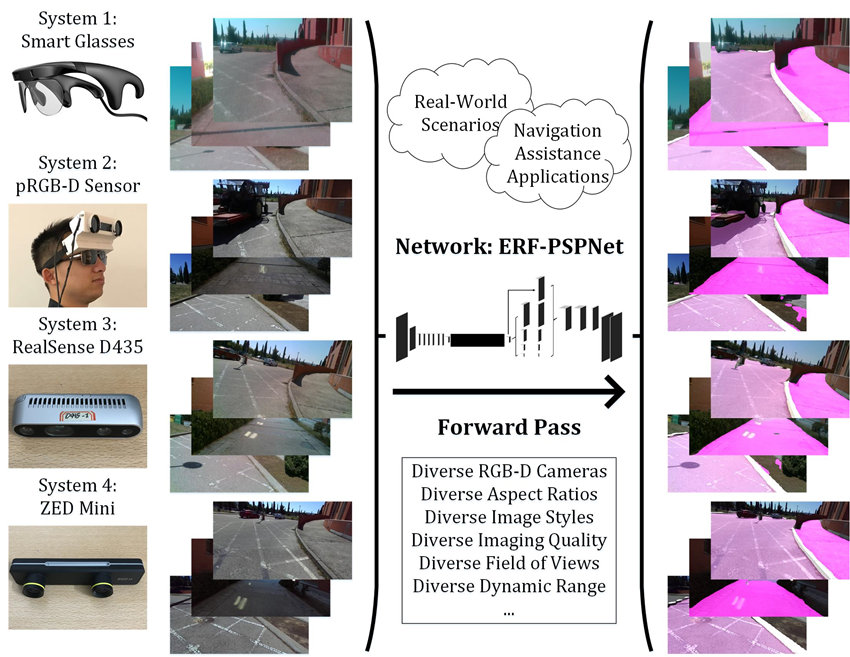
K. Yang, L.M. Bergasa, E. Romera, K. Wang.
Robustifying
Semantic Cognition of Traversability across Wearable RGB-Depth Cameras.
Applied Optics, 2019.
[Highlighted as an Editors' Pick]
[PDF]
[DATA1]
[DATA2]
[CODE]
W. Hu, K. Wang, H. Chen, R. Cheng, K. Yang.
An Indoor Positioning
Framework Based on Panoramic Visual Odometry for Visually Impaired People.
Measurement Science and Technology, 2019.
[PDF]
[CODE]
H. Chen, K. Wang, W. Hu, K. Yang, R. Cheng, J. Bai.
PALVO: Visual
odometry based on panoramic annular lens.
Optics Express, 2019.
[HTML]
[PDF]
H. Li, K. Wang, K. Yang, R. Cheng, C. Wang, L. Fei.
Unconstrained
Self-Calibration of Stereo Camera on Visually Impaired Assistance Devices.
Applied Optics, 2019.
[PDF]
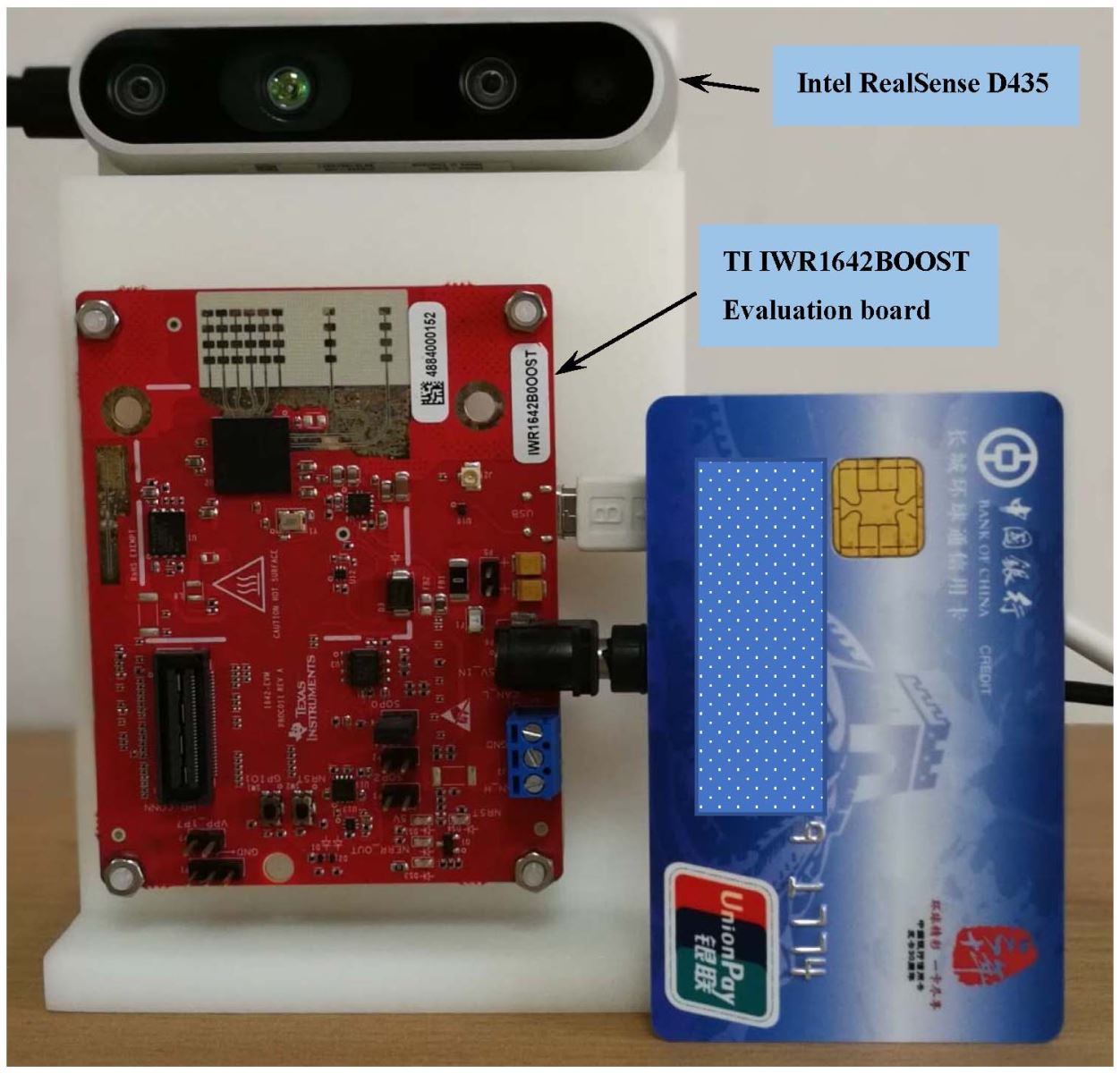
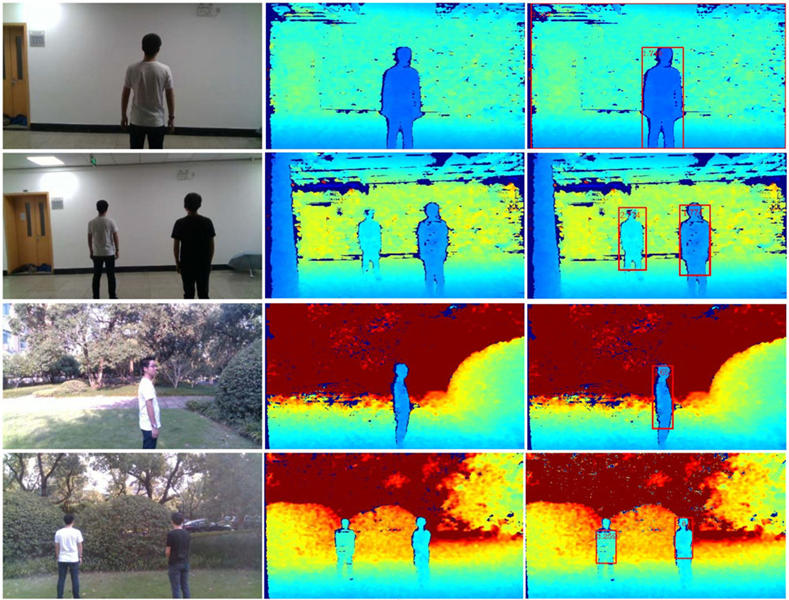
N. Long, K. Wang, R. Cheng, W. Hu, K. Yang.
Unifying Obstacle
Detection,
Recognition and Fusion Based on Millimeter Wave Radar and RGB-Depth Sensors for the
Visually Impaired.
Review of Scientific Instruments, 2019.
[HTML]
[PDF]
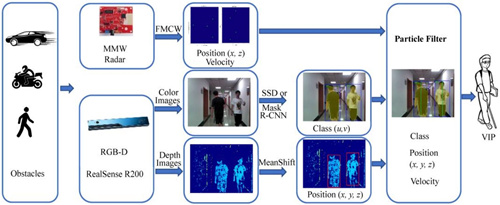
N. Long, K. Wang, R. Cheng, K. Yang, W. Hu, J. Bai.
Assisting
the visually impaired: Multi-target warning through millimeter wave radar and RGB-depth
sensors.
Journal of Electronic Imaging, 2019.
[PDF]
K. Xiang, K. Wang, K. Yang.
Importance-Aware Semantic
Segmentation with Efficient Pyramidal Context Network for Navigational Assistant
Systems.
In IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand,
October 2019.
[PDF]
[arxiv]
[CODE]
R. Cheng, K. Wang, S. Lin, W. Hu, K. Yang, X. Huang, H. Li, D. Sun, J. Bai.
Panoramic
Annular Localizer: Tackling the Variation Challenges of Outdoor Localization Using
Panoramic Annular Images and Active Deep Descriptors.
In IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand,
October 2019.
[PDF]
[arxiv]
[DATA+CODE]
X. Hu, K. Yang, L. Fei, K. Wang.
ACNet:
Attention Based Network to Exploit Complementary Features for RGBD Semantic
Segmentation.
In IEEE International Conference on Image Processing (ICIP), Taipei, China, September
2019.
[Main Publication in Google Scholar Metrics]
[PDF]
[arxiv]
[CODE]
[PaperWeekly]
[ZhiHu]
[BLOG]
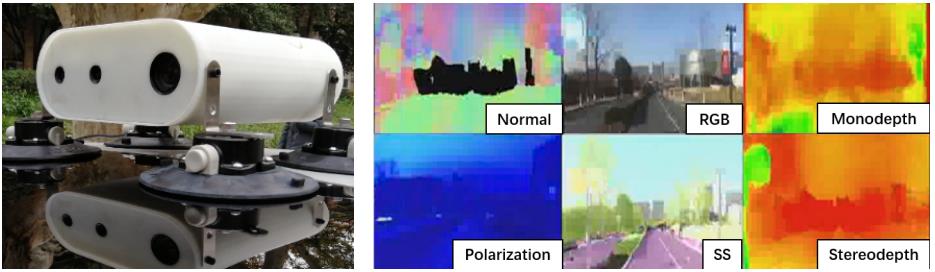
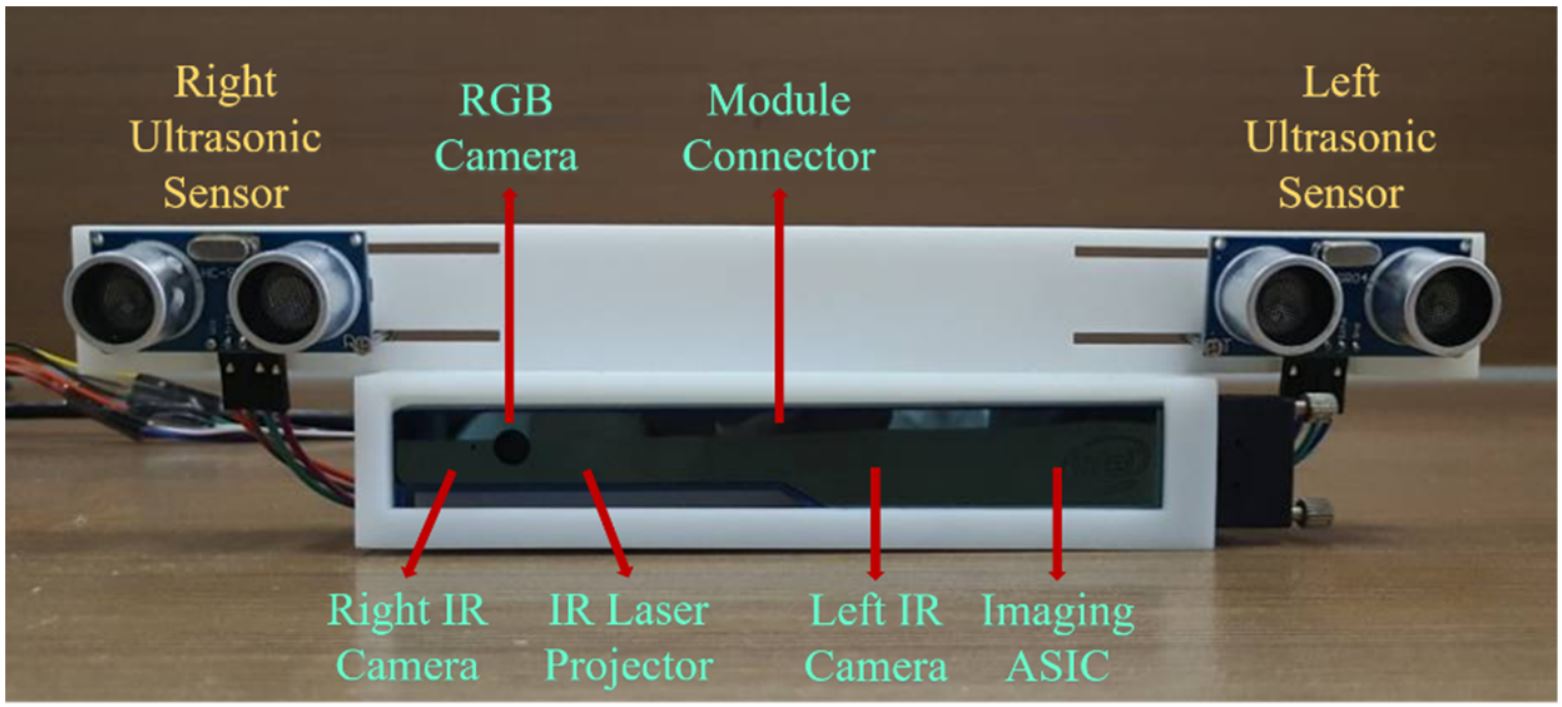
D. Sun, X. Huang, K. Yang.
A
Multimodal Vision Sensor for Autonomous Driving.
In SPIE Security + Defence Symposium, Strasbourg, France, September 2019.
[PDF]
[arxiv]
[Presentation]
[CODE]
[BLOG]
K. Xiang, K. Wang, K. Yang.
A
Comparative Study of High-Recall Real-Time Semantic Segmentation Based on Swift
Factorized Network.
In SPIE Security + Defence Symposium, Strasbourg, France, September 2019.
[PDF]
[arxiv]
[Presentation]
[CODE]
J. Wang, J. Bai, X. Huang, X. Zhou, L. Zhao, K. Yan, J. Hou, K. Yang.
Transparent
object sensing with enhanced prior from deep convolutional neural network.
In SPIE Security + Defence Symposium, Strasbourg, France, September 2019.
[PDF]
[Presentation]
Y. Xu, K. Wang, K. Yang, D. Sun, J. Fu.
Semantic
Segmentation of Panoramic Images Using a Synthetic Dataset.
In SPIE Security + Defence Symposium, Strasbourg, France, September 2019.
[PDF]
[arxiv]
[Presentation]
[VIDEO]
[DATA+CODE]
C. Xu, K. Wang, K. Yang, R. Cheng, J. Bai.
Semantic
scene understanding on mobile device with illumination invariance for the visually
impaired.
In SPIE Security + Defence Symposium, Strasbourg, France, September 2019.
[PDF]
[DATA]
L. Sun, K. Wang, K. Yang, K. Xiang.
See
Clearer at Night: Towards Robust Nighttime Semantic Segmentation through Day-Night Image
Conversion.
In SPIE Security + Defence Symposium, Strasbourg, France, September 2019.
[PDF]
[arxiv]
[Presentation]
[DATA]
[CODE]
[AITechTalk]
[ZhiHu]
Y. Fang, K. Wang, R. Cheng, K. Yang, J. Bai.
Visual
place recognition based on multi-level descriptors for the visually impaired
people.
In SPIE Security + Defence Symposium, Strasbourg, France, September 2019.
[PDF]
[Presentation]
J. Shen, K. Wang, K. Yang, K. Xiang, L. Fei, X. Hu, H. Li and H. Chen.
A
Depth Estimation Framework Based on Unsupervised Learning and Cross-Modal
Translation.
In SPIE Security + Defence Symposium, Strasbourg, France, September 2019.
[PDF]
[Presentation]
K. Yang, X. Hu, L.M. Bergasa, E. Romera, X. Huang, D. Sun, K. Wang.
Can we
PASS beyond the Field of View? Panoramic Annular Semantic Segmentation for Real-World
Surrounding Perception.
In IEEE Intelligent Vehicles Symposium (IV), Paris, France, June 2019.
[PDF]
[VIDEO]
[DATA+CODE]
[BLOG]
E. Romera, L.M. Bergasa, K. Yang, J.M. Álvarez, R. Barea.
Bridging
the Day and Night Domain Gap for Semantic Segmentation.
In IEEE Intelligent Vehicles Symposium (IV), Paris, France, June 2019.
[PDF]
[DATA]
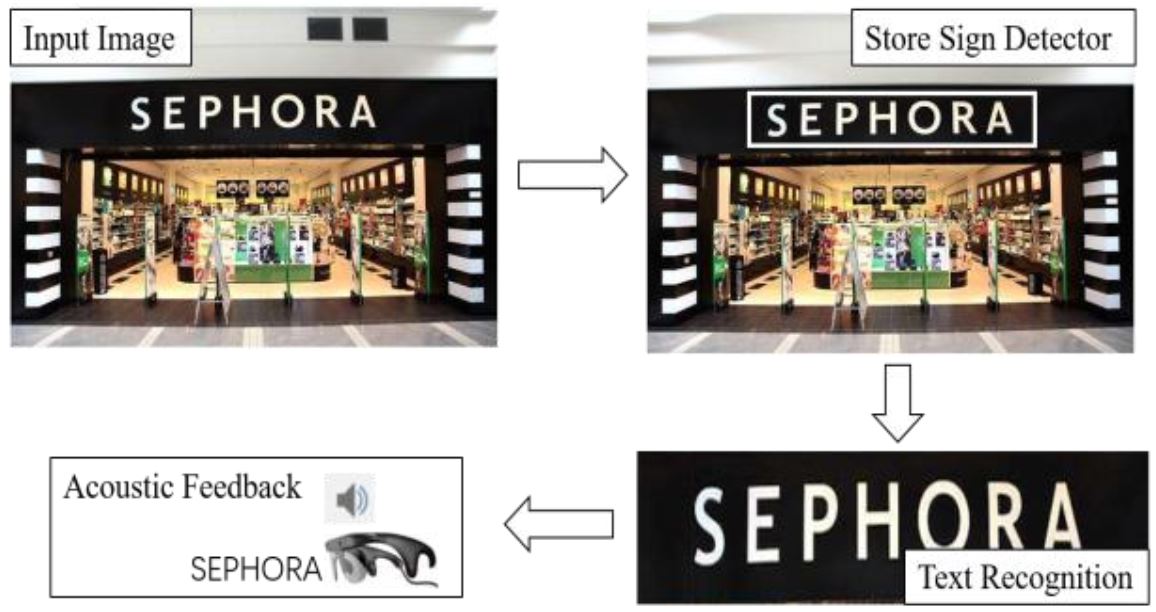
K. Xiang, K. Wang, L. Fei, K. Yang.
Store
Sign
Text Recognition for Wearable Navigation Assistance System.
In International Conference on Graphics, Images and Interactive Techniques (CGIIT),
Guangzhou, China, February 2019.
[PDF]
[BLOG]
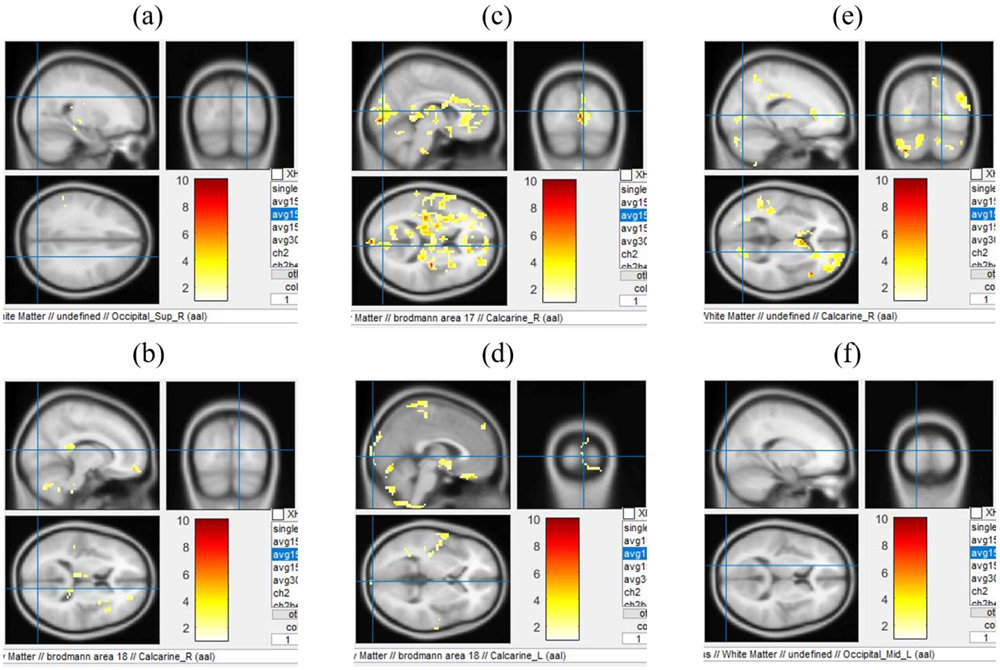
Y. Ye, K. Wang, W. Hu, H. Li, K. Yang, L. Sun, Z. Chen.
A
Wearable
Vision-To-Audio Sensory Substitution Device for Blind Assistance and the Correlated
Neural Substrates.
In International Conference on Graphics, Images and Interactive Techniques (CGIIT),
Guangzhou, China, February 2019.
[PDF]
2018 折叠

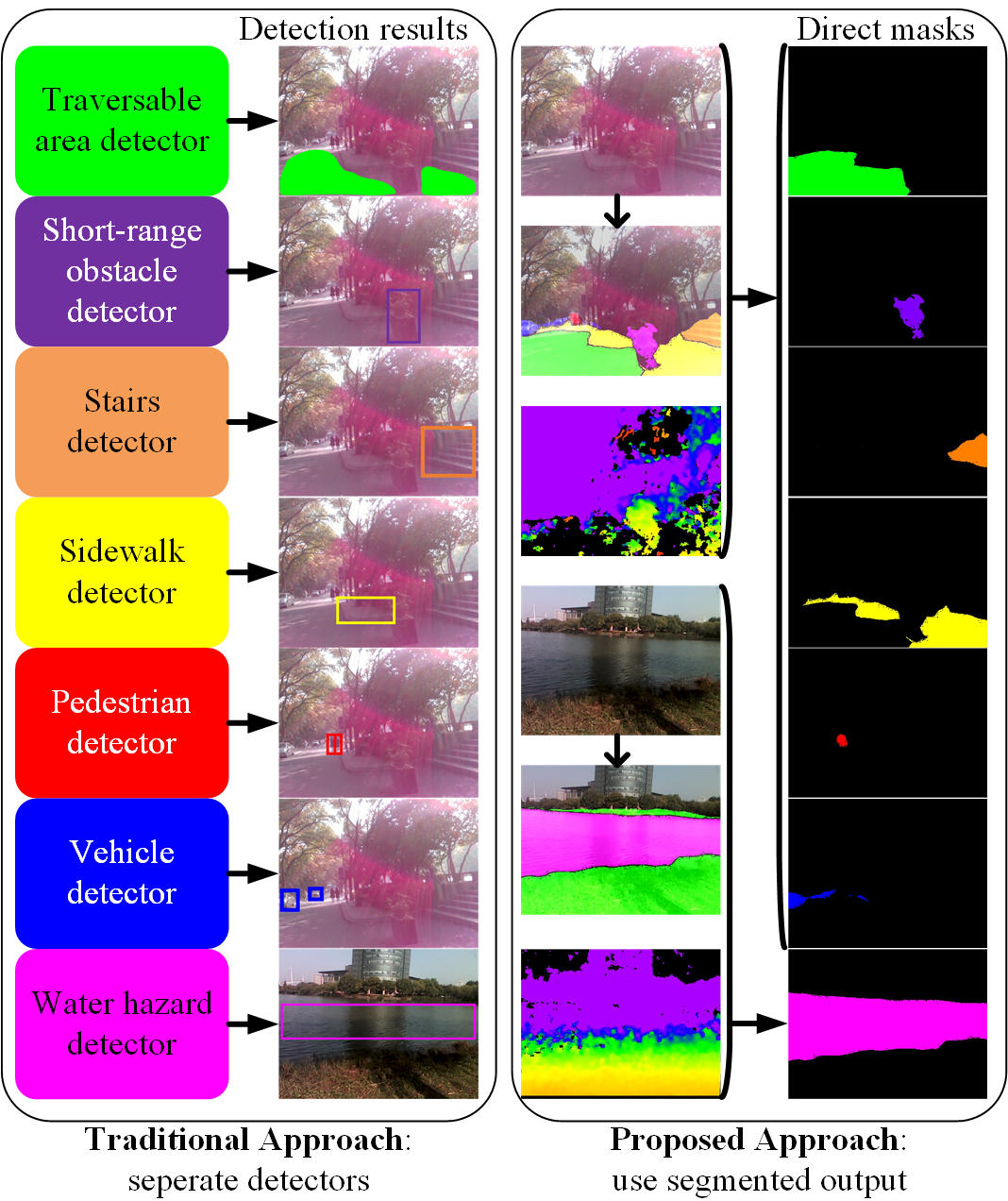
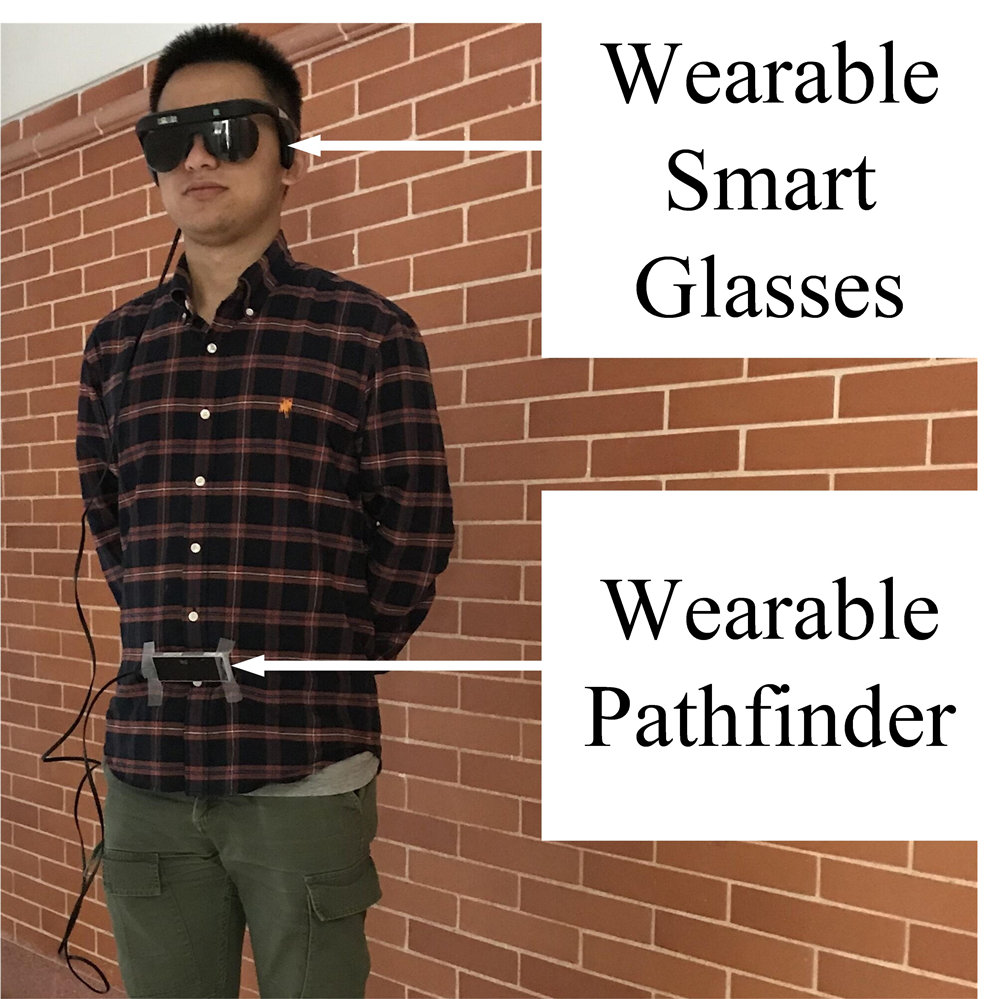
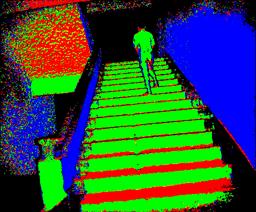
K. Yang, K. Wang, L.M. Bergasa, E. Romera, W. Hu, D. Sun, J. Sun, R. Cheng, T. Chen,
E. López.
Unifying
Terrain Awareness for the Visually Impaired through Real-Time Semantic
Segmentation.
Sensors, 2018.
Belongs to the Special Issue
[Wearable
Smart
Devices]
[HTML]
[PDF]
[DATA1]
[DATA2]
[TensorFlow]
[PyTorch]
[NVIDIA
TX1/TX2 Implementation]
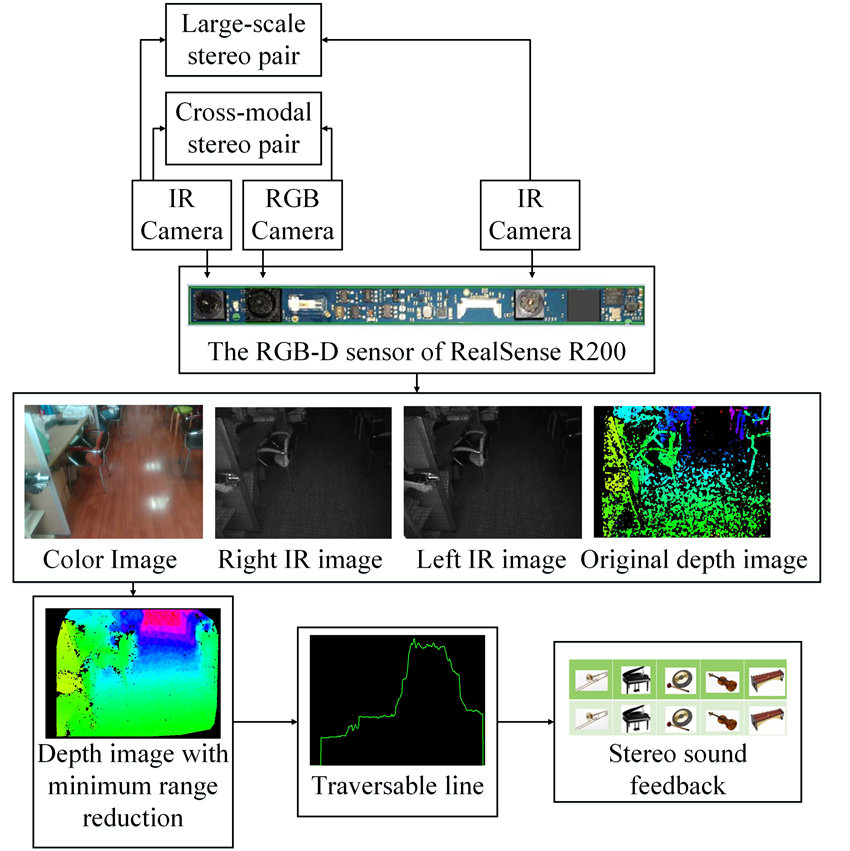
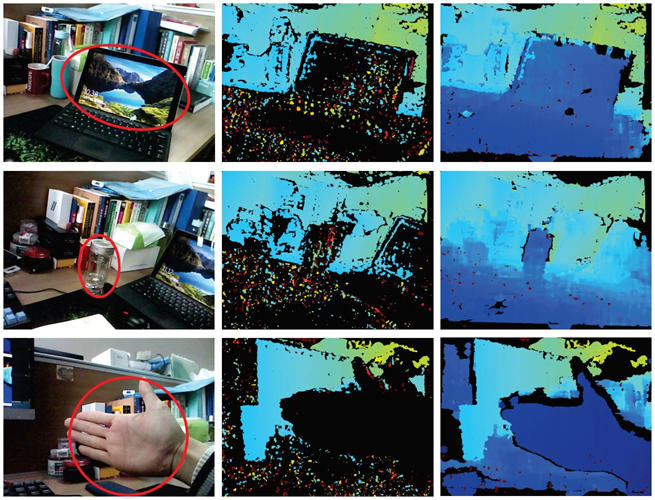
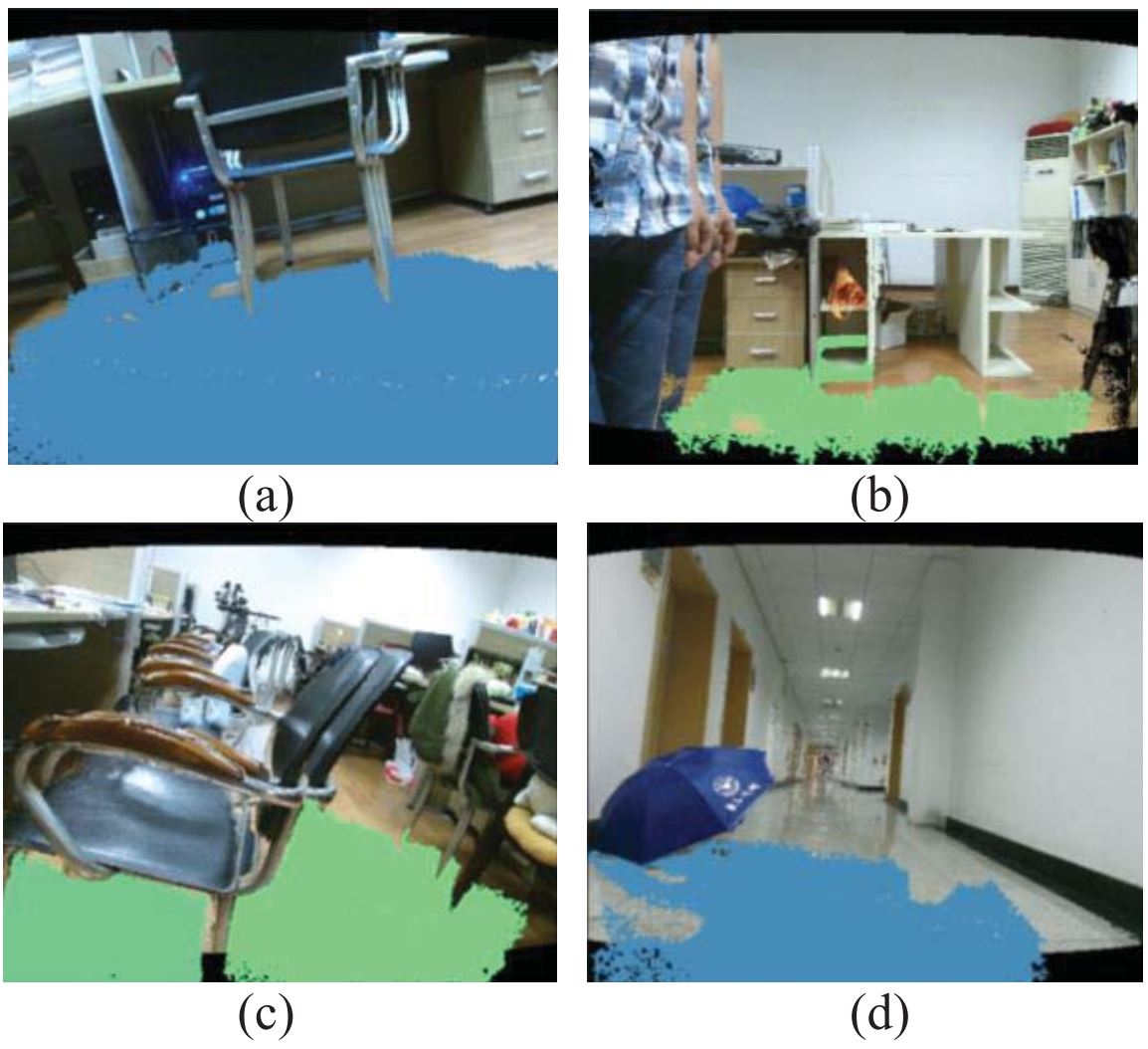
K. Yang, K. Wang, H. Chen, J. Bai.
Reducing
the
minimum range of a RGB-depth sensor to aid navigation in visually impaired
individuals.
Applied Optics, 2018.
[Highlighted as an Editors' Pick]
[PDF]
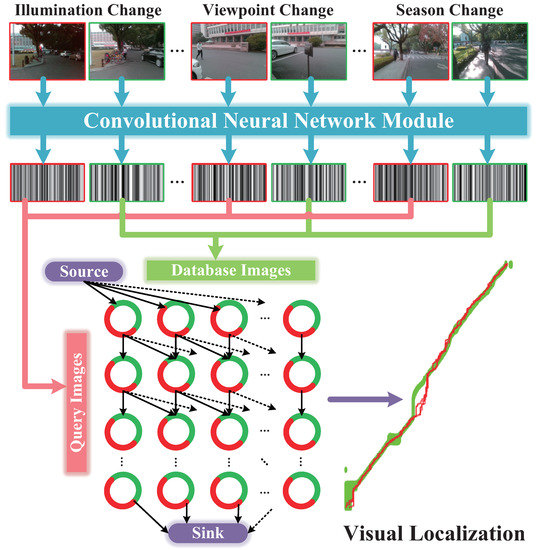
S. Lin, R. Cheng, K. Wang, K. Yang.
Visual
Localizer: Outdoor Localization Based on ConvNet Descriptor and Global Optimization for
Visually Impaired Pedestrians.
Sensors, 2018.
Belongs to the Special Issue
[Sensor
Technologies for Caring People with Disabilities]
[HTML]
[PDF]
[DATA]
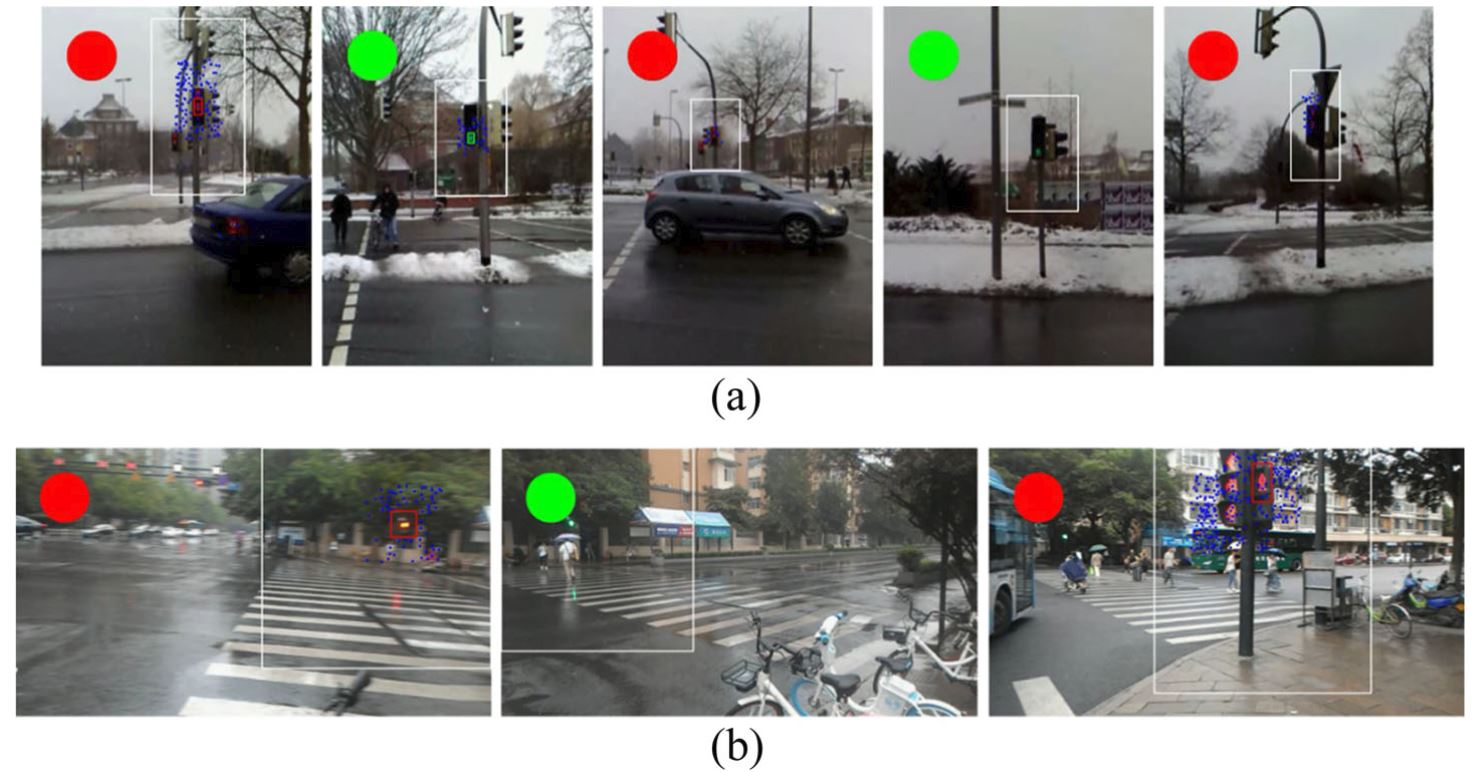
R. Cheng, K. Wang, K. Yang, N. Long, J. Bai, D. Liu.
Real-time
pedestrian
crossing lights detection algorithm for the visually impaired.
Multimedia Tools and Applications, 2018.
[PDF]
[DATA]
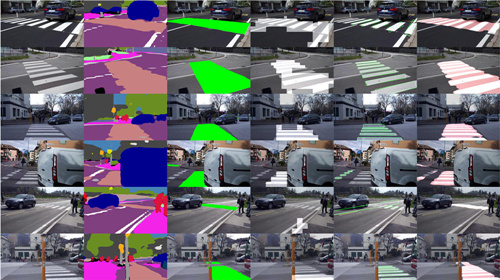
K. Yang, R. Cheng, L.M. Bergasa, E. Romera, K. Wang, N. Long.
Intersection
perception
through real-time semantic segmentation to assist navigation of visually impaired
pedestrians.
In IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur,
Malaysia, December 2018.
[PDF]
[DATA1]
[DATA2]
[BLOG]
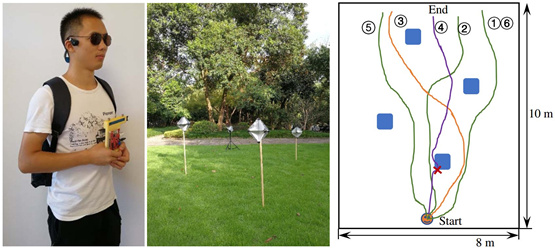
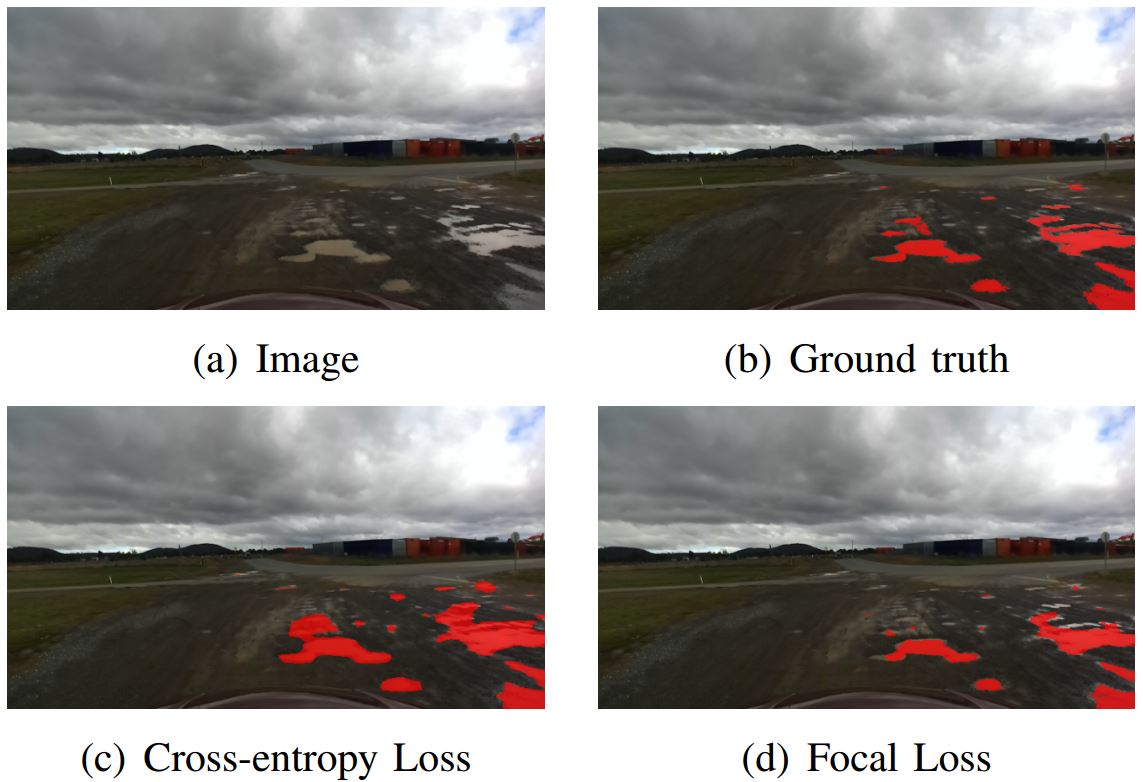
K. Yang, L.M. Bergasa, E. Romera, J. Wang, K. Wang, E. López.
Perception
framework of
water hazards beyond traversability for real-world navigation assistance
systems.
In IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur,
Malaysia, December 2018.
[PDF]
[DATA]
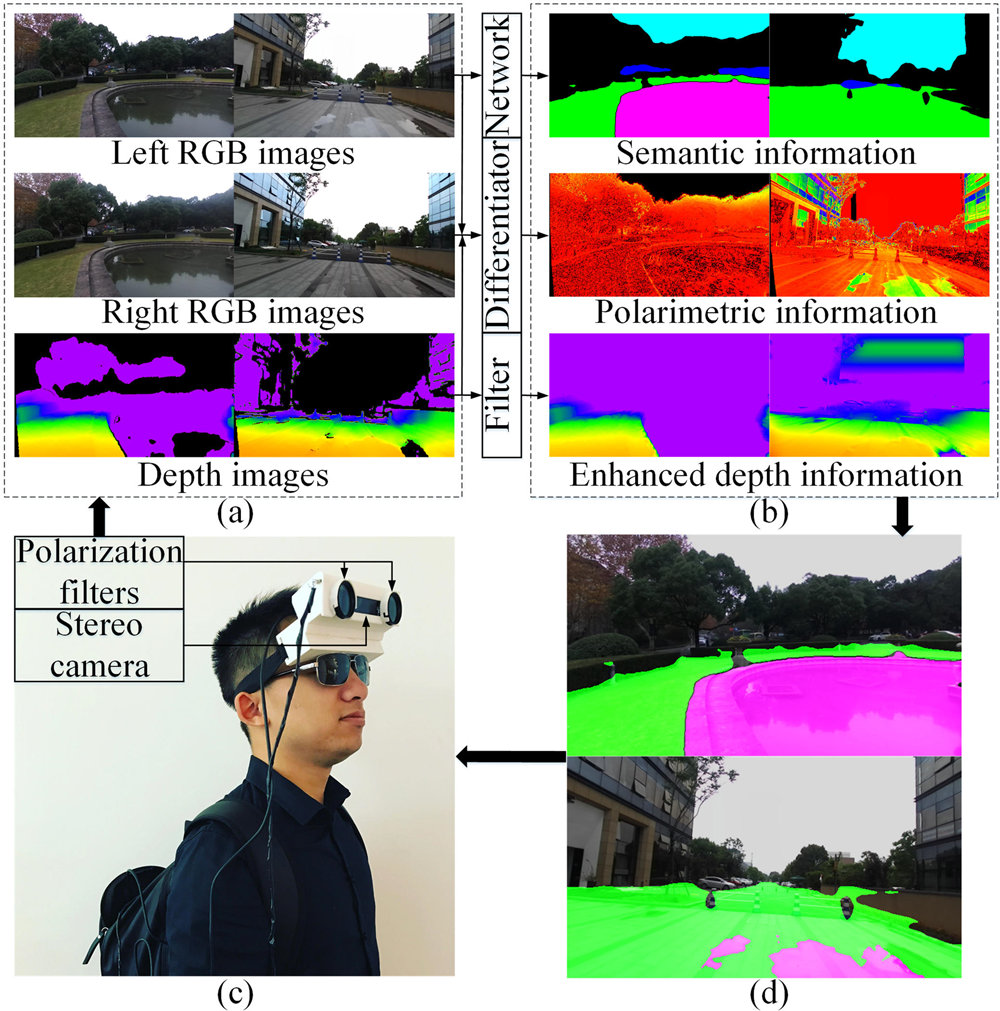
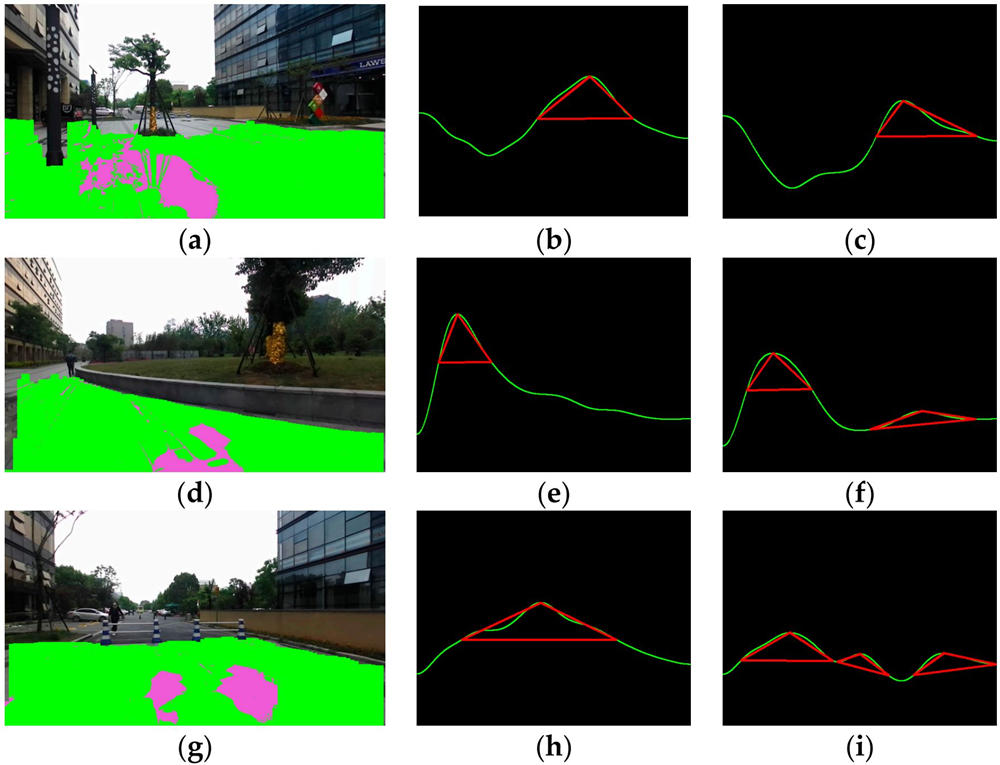
K. Yang, L.M. Bergasa, E. Romera, X. Huang, K. Wang.
Predicting
polarization beyond semantics for wearable robotics.
In IEEE-RAS International Conference on Humanoid Robots (Humanoids), Beijing, China,
November 2018.
[Spotlight Paper]
[PDF]
[DATA]
[PyTorch]
[BLOG]
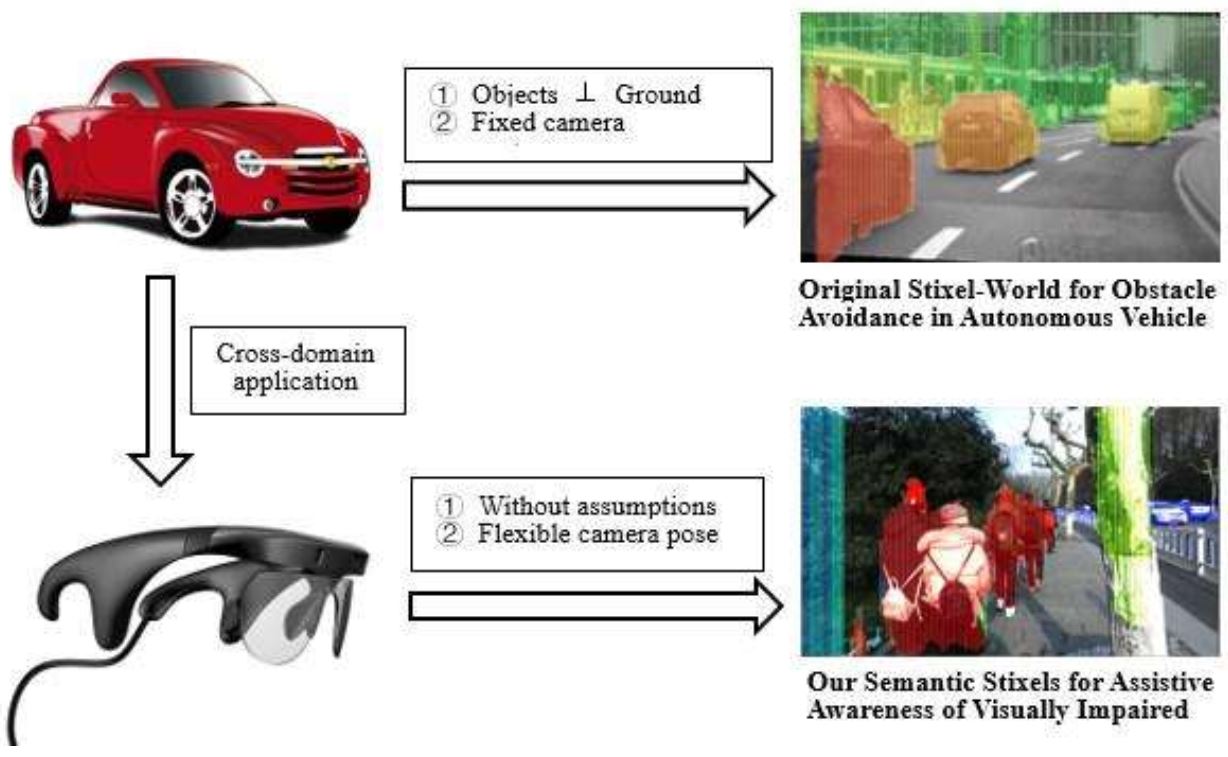
J. Wang, K. Yang, W. Hu, K. Wang.
An
environmental perception and navigational assistance system for visually impaired
persons based on semantic stixels and sound interaction.
In IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki,
Japan, October 2018.
[PDF]
[BLOG]

N. Long, K. Wang, R. Cheng, W. Hu, K. Yang.
Low Power
Millimeter Wave Radar System for the Visually Impaired.
In IET International Radar Conference (IRC), Nanjing, China, October 2018.
[Excellent Paper Award]
[PDF]
[BLOG]
Y. Ye, K. Wang, W. Hu, K. Yang.
Study on the brain mechanisum in visual assistance for the
blind.
In West-Lake Photonics Symposium (WPS), Hangzhou, China, October 2018.
[PDF]
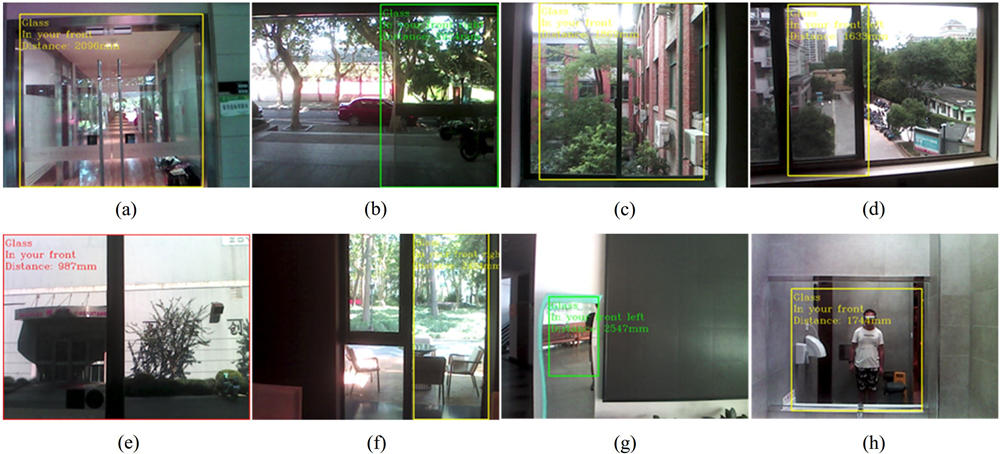
Z. Huang, K. Wang, K. Yang, R. Cheng, J. Bai.
Glass detection and recognition based on the fusion of
ultrasonic sensor and RGB-D sensor for the visually impaired.
In West-Lake Photonics Symposium (WPS), Hangzhou, China, October 2018.
[PDF]
N. Long, K. Wang, R. Cheng, K. Yang, W. Hu, J. Bai.
Mutiple Target Warning through Millimeter Wave Radar and
RGB-Depth Sensors.
In West-Lake Photonics Symposium (WPS), Hangzhou, China, October 2018.
[PDF]
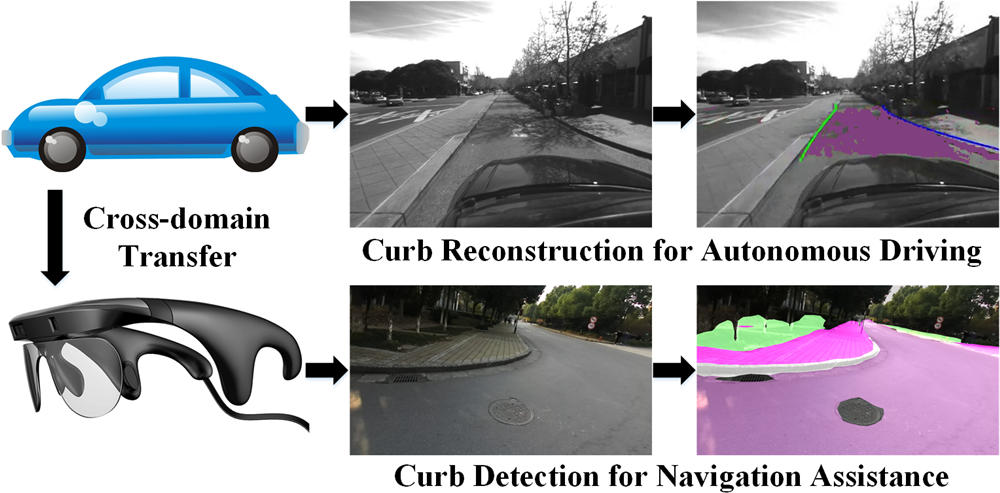
K. Yang, L.M. Bergasa, E. Romera, D. Sun, K. Wang, R. Barea.
Semantic
perception of curbs beyond traversability for real-world navigation assistance
systems.
In IEEE International Conference on Vehicular Electronics and Safety (ICVES), Madrid,
Spain, September 2018.
[PDF]
[DATA1]
[DATA2]
[BLOG]

L. Fei, K. Wang, S. Lin, K. Yang, R. Cheng and H. Chen.
Scene
text detection and recognition system for visually impaired people in real
world.
In SPIE Security + Defence Symposium, Berlin, Germany, September 2018.
[Best Student Paper]
[PDF]
[Presentation]
[BLOG]
N. Long, K. Wang, R. Cheng, K. Yang, J. Bai.
Fusion
of Millimeter wave Radar and RGB-Depth sensors for assisted navigation of the visually
impaired.
In SPIE Security + Defence Symposium, Berlin, Germany, September 2018.
[PDF]
[Presentation]
Z. Huang, K. Wang, K. Yang, R. Cheng, J. Bai.
Glass
Detection and Recognition Based on the Fusion of Ultrasonic Sensor and RGB-D Sensor for
the Visually Impaired.
In SPIE Security + Defence Symposium, Berlin, Germany, September 2018.
[PDF]
[Presentation]
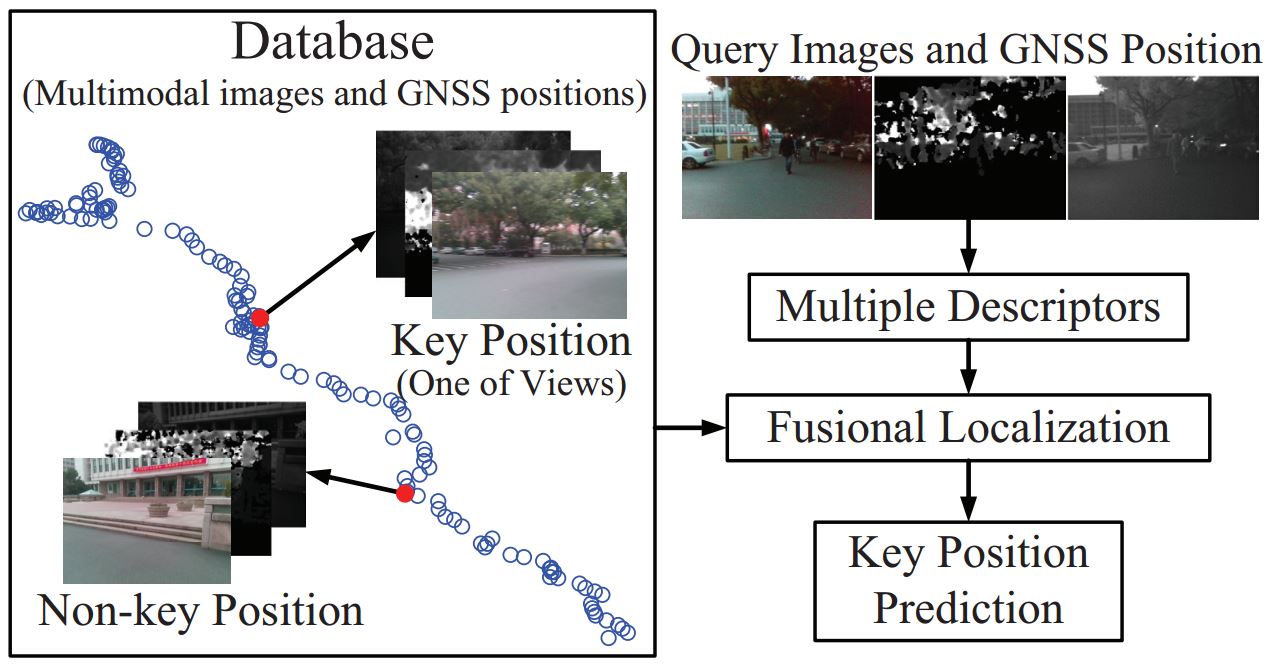
R. Cheng, K. Wang, L. Lin, K. Yang.
Visual
Localization of Key Positions for Visually Impaired People.
In International Conference on Pattern Recognition (ICPR), Beijing, China, August
2018.
[PDF]
[arxiv]
[DATA]
[CODE]
[BLOG]
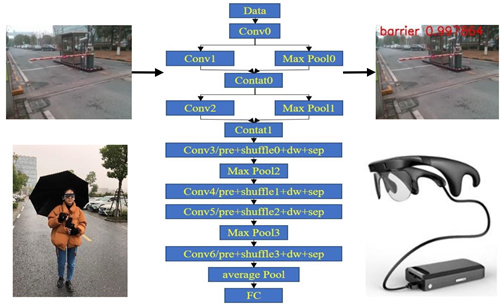
S. Lin, K. Wang, K. Yang, R. Cheng.
KrNet: A
Kinetic
Real-time Convolutional Neural Network for Navigational Assistance.
In International Conference on Computers Helping People with Special Needs (ICCHP),
Linz, Austria, July 2018.
[PDF]
[BLOG]
K. Yang, L.M. Bergasa, E. Romera, R. Cheng, T. Chen, K. Wang.
Unifying
terrain awareness through real-time semantic segmentation.
In IEEE Intelligent Vehicles Symposium (IV), Suzhou, China, June 2018.
[Main Publication in Google Scholar Metrics]
[PDF]
[VIDEO]
[DATA1]
[DATA2]
[TensorFlow]
[PyTorch]
[BLOG]
K. Yang, K. Wang, S. Lin, J. Bai, L.M. Bergasa, R. Arroyo.
Long-range
Traversability Awareness and Low-lying Obstacle Negotiation with RealSense for the
Visually Impaired.
In International Conference on Information Science and System (ICISS), Jeju Island,
South Korea, April 2018.
[PDF]
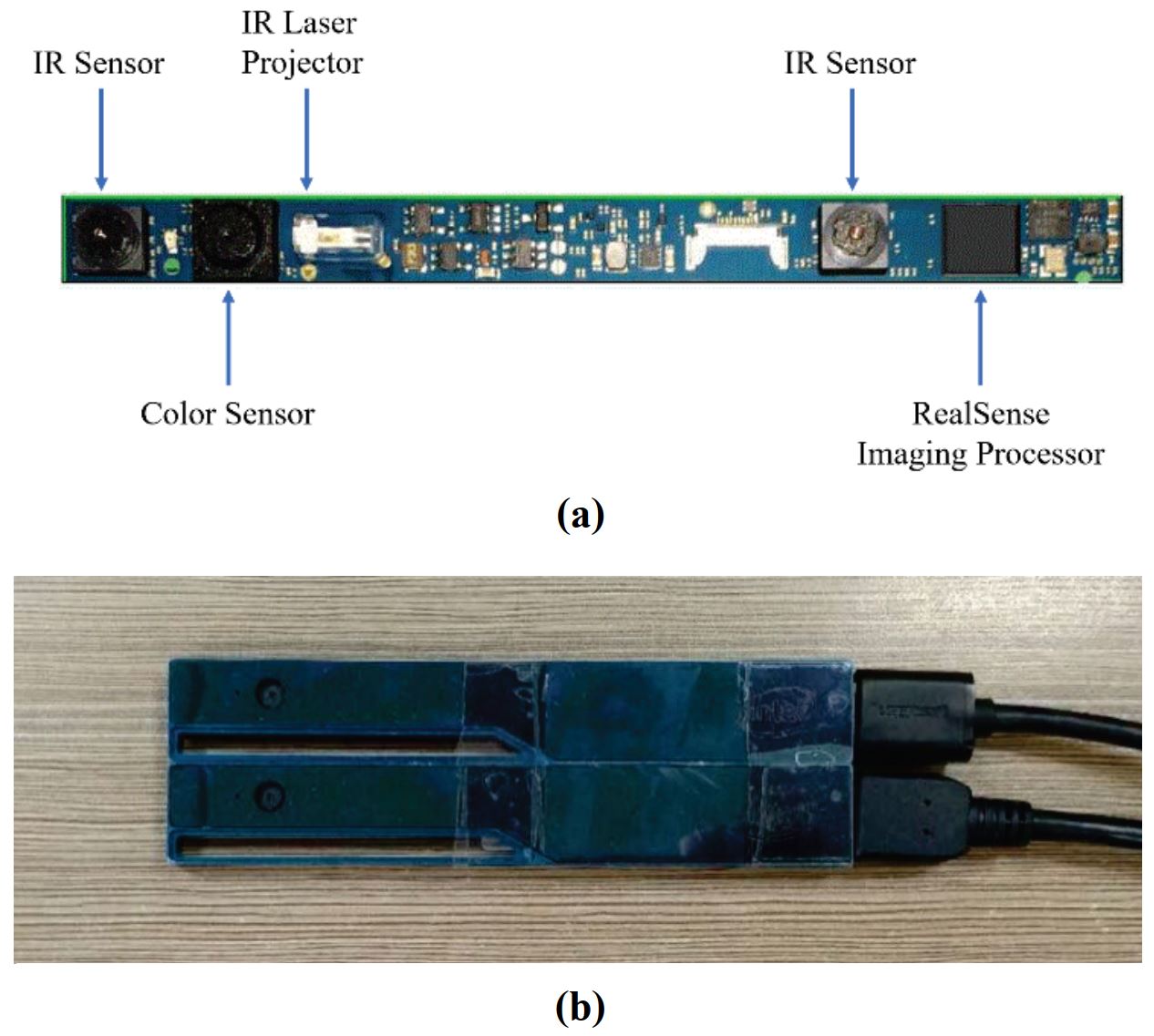
H. Chen, K. Wang, K. Yang.
Improving
RealSense by Fusing Color Stereo Vision and Infrared Stereo Vision for the Visually
Impaired.
In International Conference on Information Science and System (ICISS), Jeju Island,
South Korea, April 2018.
[PDF]
K. Yang, K. Wang, S. Lin, J. Bai, L.M. Bergasa, R. Arroyo.
Long-range Traversability Awareness and Low-lying Obstacle
Negotiation with RealSense for the Visually Impaired.
In International Conference on Frontiers of Image Processing (ICFIP), Barcelona,
Spain, March 2018.
[Best
Paper Award]
[PDF]
[BLOG]
H. Chen, K. Wang, K. Yang.
Improving RealSense by Fusing Color Stereo Vision and Infrared
Stereo Vision for the Visually Impaired.
In International Conference on Frontiers of Image Processing (ICFIP), Barcelona,
Spain, March 2018.
[PDF]
2017 折叠
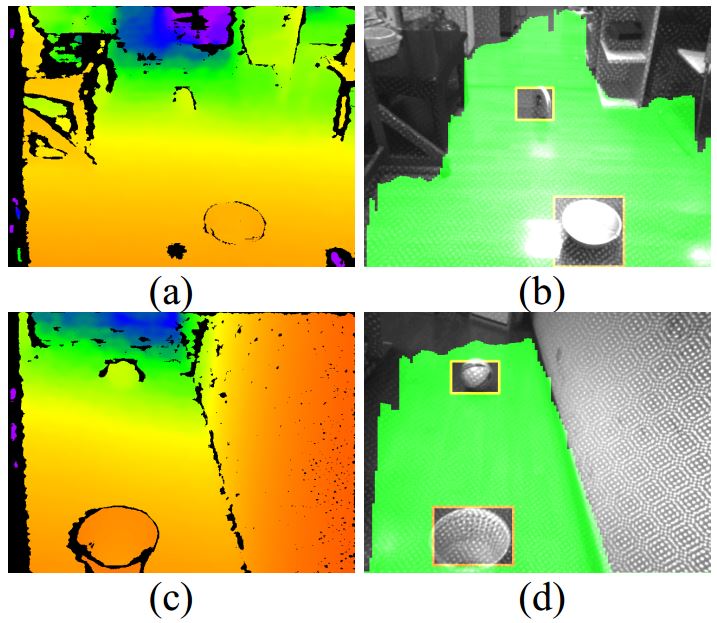
K. Yang, K. Wang, R. Cheng, W. Hu, X. Huang, J. Bai.
Detecting
Traversable Area and Water Hazards for the Visually Impaired with a pRGB-D
Sensor.
Sensors, 2017.
[HTML]
[PDF]
[DATA]

K. Yang, K. Wang, X. Zhao, R. Cheng, J. Bai, Y. Yang, D. Liu.
IR
stereo RealSense: Decreasing minimum range of navigational assistance for visually
impaired individuals.
Journal of Ambient Intelligence and Smart Environments, 2017.
[PDF]

R. Cheng, K. Wang, K. Yang, N. Long, W. Hu, H. Chen, J. Bai, D. Liu.
Crosswalk
navigation for people with visual impairments on a wearable device.
Journal of Electronic Imaging, 2017.
[PDF]
[DATA1]
[DATA2]
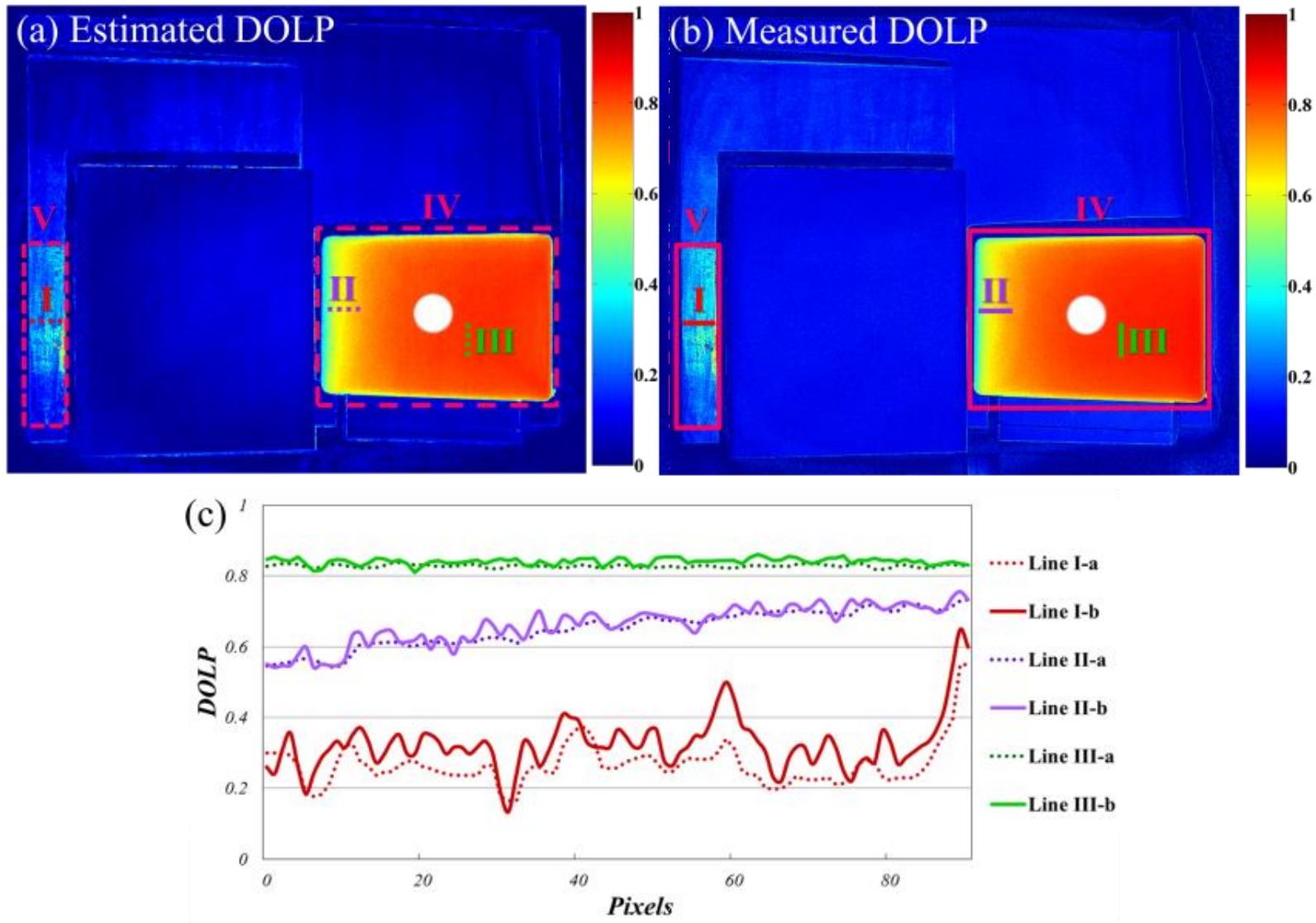
X. Huang, J. Bai, K. Wang, Q. Liu, Y. Luo, K. Yang, X. Zhang.
Target
enhanced 3D
reconstruction based on polarization-coded structured light.
Optics Express, 2017.
[HTML]
[PDF]
2016 折叠
K. Yang, K. Wang, W. Hu, J. Bai.
Expanding the
Detection of Traversable Area with RealSense for the Visually Impaired.
Sensors, 2016.
[HTML]
[PDF]
X. Zhao, K. Wang, K. Yang, W. Hu.
Unconstrained
Face Detection and Recognition Based on RGB-D Camera for the Visually Impaired.
In International Conference on Graphic and Image Processing (ICGIP), Tokyo, Japan, August
2016.
[PDF]
2015 折叠
K. Yang, K. Wang, R. Cheng, X. Zhu.
A
new approach of point cloud processing and scene segmentation for guiding the visually
impaired.
In IET International Conference on Biomedical Image and Signal Processing (ICBISP),
Beijing, China, November 2015.
[PDF]
[BLOG]
R. Cheng, K. Wang, K. Yang, X. Zhao.
A
Ground and Obstacle Detection Algorithm for the Visually Impaired.
In IET International Conference on Biomedical Image and Signal Processing (ICBISP),
Beijing, China, November 2015.
[PDF]